所屬科目:高中技藝◆機器人
1. 有關機器人的敘述下列何者 正確 ? (A)機器人沒有存在的必要 (B)機器人在生活之中完全無法應用 (C)機器人可取代重複性或有危險性的工作 (D)機器人並不能為人類帶來便利
2. 若貨物需放在20 公分高的貨櫃上,其手臂機構至少需要能上升多高 ? (A)低於20 公分 (B)高於20 公分 (C)等於20 公分 (D)不必理會貨櫃高度
3. 機器人robot 一詞源自 ? (A)日本科幻漫畫 (B)斯洛伐克劇本 (C)美國科幻作家艾西莫夫 (D)機器人之父-英格柏格論文
4. 美國好萊塢電影凡是處理機器人的題材,總是會引用「機器人學三大法則」,以下哪一個 不是 三大法則 ? (A)機器人因工作性質,可以傷害自己 (B)機器人必須保護自己 (C)機器人不得傷害人類 (D)機器人必須服從人類的命令
5. 2005 年在日本哪一個地方舉行機器人世界博覽會 ? (A)東京都 (B)愛知縣 (C)京都 (D)名古屋
6. 樂高(Lego)公司推出機器人(EV3)套件,讓機器人可以像積木般組裝設計,請問它是 哪一個國家的公司 ? (A)美國 (B)德國 (C)丹麥 (D)瑞典
7. AGV 是工廠常見的自動化裝置,它的中文名字常稱為 ? (A)人型機器人 (B)無人搬運車 (C)仿生機器人 (D)手術機器人
8. 台灣第一座機器人博物館,座落於哪一所大學內 ? (A)台北城市科技大學 (B)台灣科技大學 (C)台灣大學 (D)南台科技大學
9. 製作出世界第一台工業機器人並成立世界上第一家工業機器人製造工廠,是哪一個國家 ? (A)德國 (B)日本 (C)俄國 (D)美國
10. 台灣第一座機器人夢工廠,為國內哪一家公司所成立 ? (A)台灣積體電路製造股份有限公司 (B)聯華電子股份有限公司 (C)祥儀企業股份有限公司 (D)鴻海科技集團
11. 關於工科技藝競賽機器人職組,未公開試題佔的總分比率為多少 ? (A)35% (B)30% (C)20% (D)25%
12. 參照競賽機器人職組的題目,要搬運之物件分別為大物件3 分、中物件2 分、小物件1 分, 每種物件各有3 個,我要組成7 分,請問如何解法 ? (A)大物件2 個、中物件1 個、小物件1 個 (B)大物件1 個、中物件2 個、小物件1 個 (C)大物件1 個、中物件2 個、小物件0 個 (D)大物件1 個、中物件1 個、小物件3 個
13. 在工科技藝競賽機器人職類一組人數為何 ?________人 (A)1 (B)2 (C)3 (D)沒有上限
14. 若裁判在說明試題或解釋問題有不明白的地方,選手下列何種處理方式 較為合適 ? (A)可以現場舉手提出問題,讓裁判可以解釋或說明的更詳細 (B)悶在心裡不要說出來,怕丟臉 (C)裁判說的都是對的不該有質疑 (D)跟自己的夥伴討論出結果即可,不需要向裁判提問
15. 在國家推動的「智慧機械」,在工科技藝競賽中下列哪個職類跟此項政策有關係 ? (A)服裝設計 (B)機器人 (C)美髮 (D)餐飲服務
16. 威金設計一台機器人,下列設計的部分可能在工科技藝競賽機器人職類有 違規 的地方 ? (A)機器人總長53 公分,寬46 公分 (B)為了讓機器人有多手臂的功能,因此機器人高度為93 公分 (C)重量為25 公斤重 (D)搭載全向輪三輪驅動
17. 在工科技藝競賽機器人職類中,當比賽完畢後下列何者敘述 正確 ? (A)裁判評斷完分數後,一定要仔細核對再簽名 (B)比賽完後裁判算分一定無誤,只要簽名即可 (C)看到分數後,即可搬離機器人,回到自己工作岡位上 (D)比賽完不需要知道分數,全部比完會統一說明
18. 小明第一次接觸機器人並不了解什麼是萬向輪,請問下圖何者是萬向輪 ? (A) (B) (C) (D)
19. 若原本夾緊的貨物卻會時常滑落,加上砂紙在金屬夾爪上卻可以有效改善 。主要原因為 下列何者 ? (A)摩擦力 (B)精神力 (C)超能力 (D)地心引力
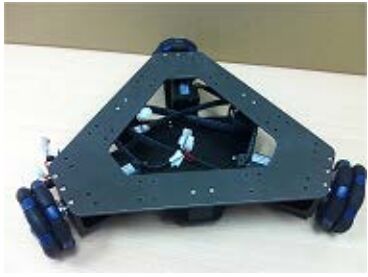
20. 有關下圖機器人底盤之驅動輪為何 ?
(A)越野輪 (B)麥克納姆輪 (C)全向輪 (D)一般輪子
21. 如果要完成機器人三輪全方向位移,安裝輪子的角度何者 正確 ? (A)30、60、90 (B)5、115、225 (C)30、150、270 (D)10、140、270
22. 一般所使用麥克納姆輪的輪轂軸(車輪轉動軸)與輥子(滾筒圓周輪)轉軸的夾角為幾度 ?_______度 (A)15 (B)20 (C)30 (D)45
23. 摩擦力與正壓力成 ? (A)反比 (B)正比 (C)平方反比 (D)平方正比
24. 若機器人的電池組使用容量為1200mAh 的3 號(AA)鎳氫電池6 顆串聯而成,試問電池 組可提供多少電壓 ? (A)7.2 V (B)8.4 V (C)9 V (D)12 V
25. 在直接驅動馬達中,若要控制馬達扭力可調整 ? (A)電壓 (B)電流 (C)電阻 (D)電感
26. 馬達使用減速機之目的,下列何者 正確 ? (A)降低輸入電流 (B)降低輸入電壓 (C)提高傳動效率 (D)提高輸出轉矩
27. 下列何者 不是 影像處理的功能 ? (A)追蹤物體 (B)找特徵點 (C)色彩空間轉換 (D)網路偵測
28. 一台機器人前面有3 個箱子,箱子顏色分別為紅、黑、白,如果要辨別出前面三個箱子 的顏色哪種感測器 比較適合 ? (A)光感測器 (B)顏色感測器 (C)溫度感測器 (D)紅外線感測器
29. 下列何者感應器,是仿效人體的聽覺,讓機器人擁有判斷的智慧能力 ? (A)壓力感測器 (B)聲音感測器 (C)循線感應器 (D)溫度感測器
30. 下圖中何者為樂高系列的超音波感測器 ? (A) (B) (C) (D)
31. 光電感測器的發送器為下列何者 ? (A)發光二極體 (B)天線 (C)光電晶體 (D)藍牙
32. 在競賽中,輪型機器人需追蹤一個紅色的撞球,以下哪一種方式最 有效 ? (A)紅外線感測器追蹤 (B)超音波感測器追蹤 (C)CAM 配合影像處理 (D)壓力感測器追蹤
33. 常用來量測機器人是否傾倒的感測器為 ? (A)陀螺儀 (B)里程計 (C)電子羅盤 (D)紅外線感測器
34. 機器人的環境感測技術中,下列哪一種感測器屬於接觸式的 ? (A)超音波感測器 (B)雷射測距儀 (C)壓力感測器 (D)立體視覺
35. 如果輪型機器人必須循著黑色膠帶行進,下列感測元件何者 比較合適 ? (A)光電感測器 (B)超音波 (C)熱敏電阻 (D)電子羅盤
36. 以下哪一種 不屬於 光感測元件 ? (A)LED (B)色彩感測器 (C)光敏電阻 (D)紅外線感測器
37. 利用發射及接收超音波來量測距離,通常需要量測發射波與反射波之何種信號 ? (A)波之頻率 (B)時間差 (C)波之強度 (D)波之波長
38. 如果超音波在空氣的傳遞速度為344m/sec,機器人發射及接收超音波反射信號共耗時 0.1sec,試問機器人與障礙物之距離約為多少公尺 ? (A)17.2 m (B)8.6 m (C)4.3m (D)34.4m
39. 應用於馬達轉速偵測的光遮斷圓盤有60 個透光孔,若測得120 個脈波,則馬達旋轉角度 為 ? (A)360 O (B)180 O (C)720 O (D)90 O
40. 應用於馬達轉速偵測的光遮斷圓盤有1024 個透光孔,若馬達旋轉180 O時,應累計測得脈 波數為何 ? (A)1024 個 (B)512 個 (C)2048 個 (D)256 個
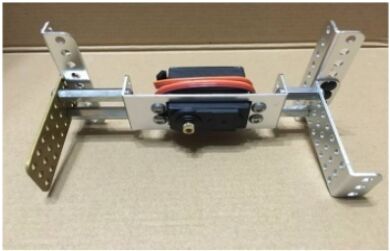
41. 下圖中的夾爪機構,是使用何種馬達 ?
(A)DC Motor(DC 直流馬達) (B)RC Servor(伺服馬達) (C)步進馬達 (D)DC 直流無刷伺服馬達
42. 如下圖所示,二輪機器人輪胎直徑為9.6 公分,請問輪胎旋轉一圈機器人移動了多少距離 ?
(A)24.846 cm (B)30.159 cm (C)38.785 cm (D)42.915 cm
43. 一個步進角為1.8 度的步進馬達(1.8°/step),試問逆時針轉90 度應送幾步的控制訊號方可達成 ?________步 (A)45 (B)50 (C)90 (D)100
44. 如果輪型機器人採用RC 伺服機在脈波寬度等於1.5ms 時靜止不動,以下哪個脈波寬度會 使伺服機轉動 最快 ? (A)1.6 ms (B)1.8 ms (C)2.0 ms (D)2.2 ms
45. 輪型機器人左右兩輪都由兩個伺服機獨立驅動,而且伺服機在脈波寬度等於1.5 ms 時靜 止不動,如果提供給左右兩輪伺服機的脈波寬度都是2.2 ms,輪型機器人會 ? (A)停止不動 (B)直線前進 (C)直線後退 (D)原地旋轉
46. 自走車採用3個紅外線光反射器感測路徑狀態,若偵測到軌跡為0,未偵測到為1,且自走 車的左、右馬達為獨立的動輪,則自走車前進過程中偵測到數值由左而右為011時,自走車應如 何進行修正 ? (A)左、右馬達繼續前進 (B)左馬達前進,右馬達停止 (C)左馬達停止,右馬達前進 (D)左、右馬達皆停止
47. 循跡自走車採用5個紅外線光反射器感測路徑狀態,若偵測到軌跡為1,未偵測到為0,則 當自走車往前行走,偵測到由左至右數值為00110的感測值時,代表自走車的狀態為 ? (A)車身稍偏至軌跡左邊 (B)車身稍偏至軌跡右邊 (C)車身偏至軌跡左邊很多 (D)車身偏至軌跡右邊很多
48. 在機器人運動控制中,於前端及兩側平均分佈使用九個超音波偵測障礙物,若偵測到障礙 物時信號為1,未偵測到障礙物時信號為0,當機器人前進運動中,偵測到由左至右之信號為 111110000 時,若機器人要避開障礙物之運動狀態為 ? (A)機器人偏左邊運動 (B)機器人偏右邊運動 (C)機器人直線前進 (D)機器人先後退再作偵測判斷
49. 在Pioneer P3DX 移動機器人前面平均分配八個超音波感測器來偵測障礙物,其安全距離 設定為30cm,而超音波感測器配置方式從左至右為1-8,若移動機器人往前運動其量測值1-8 皆 為20cm,若機器人要避開障礙物之運動狀態為 ? (A)機器人偏左邊運動 (B)機器人偏右邊運動 (C)機器人直線前進 (D)機器人後退
50. 移動機器人學的三個關鍵問題中,下列選項何者 為非 ? (A)我在那裡? (B)我要去那裡? (C)我如何到達那裡 (D)價格有多貴
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (B)
(B) (C)
(C) (D)
(D)
 (A)越野輪 (B)麥克納姆輪 (C)全向輪 (D)一般輪子
(A)越野輪 (B)麥克納姆輪 (C)全向輪 (D)一般輪子 (B)
(B) (C)
(C) (D)
(D)
 (A)DC Motor(DC 直流馬達) (B)RC Servor(伺服馬達) (C)步進馬達 (D)DC 直流無刷伺服馬達
(A)DC Motor(DC 直流馬達) (B)RC Servor(伺服馬達) (C)步進馬達 (D)DC 直流無刷伺服馬達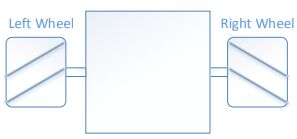 (A)24.846 cm (B)30.159 cm (C)38.785 cm (D)42.915 cm
(A)24.846 cm (B)30.159 cm (C)38.785 cm (D)42.915 cm