所屬科目:高中技藝◆機器人
1. 藍芽 (Bluetooth) 是一種無線通訊技術,技術始於哪一家公司的1994方案? (A)Sony (B)Nokia (C)Ericsson (D)Intel。
2. OpenCV電腦視覺開源程式庫是目前智慧機器人領域中,最常被廣泛使用的影像辨識或視覺式同步定位建圖軟體框架,下列何者非常見之應用? (A)物件方位辨識 (B)移動路徑規劃 (C)機器人定位 (D)判斷工件的軟硬度。
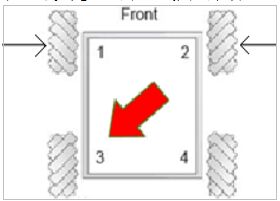
3. 請問下圖麥克納姆輪沿著粗箭頭指示的方向移動,其1~4輪面對轉軸細線所指的轉向為何?
(A)逆、靜止、靜止、順。 (B)順、靜止、靜止、逆。 (C)順、逆、順、逆。 (D)靜止、逆、靜止、逆。
4. 齒輪為傳動系統上常用的機構之一。下列哪一個齒輪組輸入軸和輸出軸的方向必不同? (A)傘齒輪 (B)行星齒輪 (C)正齒輪 (D)斜齒輪。
5. 所謂電池容量即電池所能供應之: (A)電壓與電流之乘積。 (B)電壓與時間之乘積。 (C)電流與時間之乘積。 (D)電流平方與時間之乘積。
6. 王美第一次接觸機器人並不了解什麼是全向輪,請問下圖何者是全向輪? (A) (B) (C) (D)。
7. 如果要完成機器人三輪全方向位移安裝輪子的角度何者 錯誤 ? (A)0、120、240 (B)30、60、90 (C)30、150、270 (D)15、135、255。
8. 日本可說是「機器人王國」,特別是哪一年之後工業機器人帶動的科技發展,日本稱該年為「機器人元年」? (A)1967 (B)1973 (C)1980 (D)1983。
9. 在有斜坡的場地,輪型機器人可用以下哪一種元件分辨平地與斜坡? (A)電子羅盤 (B)GPS模組 (C)旋轉編碼器 (D)加速度計。
10. 在 Ubuntu 中移動 (change directory)至上一層目錄的命令列指令為下列何者? (A)cd . (B)cd .. (C)cd ~ (D)cd /。
11. KNRm的直流馬達規格,齒輪比為27:1,編碼器的光遮斷圓盤有32個透光孔,輸出軸旋轉90度,會累計測得多少脈波? (A)216 (B)432 (C)864 (D)1024。
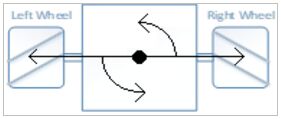
12. 如下圖所示,二輪機器人輪胎直徑為8.6公分,二輪的間距為23.5公分,使用差動驅動方式往左旋轉,左右輪胎各移動49.88公分,請換算左右輪馬達需要旋轉的圈數,達到相通的效果?
(A) 1.289(B)1.523 (C)1.658 (D)1.846。
13. 機器人可利用以下哪一個感測器來測量重力? (A)陀螺儀 (B)電子羅盤 (C)加速度計 (D)顏色感測器。
14. 移動機器人上常用的視覺感測器為何? (A)CCD攝影機 (B)聲納感應器 (C)紅外線感應器 (D)雷射測距儀。
15. 自走車採用3個紅外線光反射器感測路徑狀態,若偵測到軌跡為0,未偵測到為1,且自走車的左、右馬達為獨立的動輪,則自走車前進過程中偵測到數值由左而右為110時,自走車應如何進行修正? (A)左、右馬達繼續前進。 (B)左馬達前進,右馬達停止。 (C)左馬達停止,右馬達前進。 (D)左、右馬達皆停止。
16. 有一馬達效率為80%,輸入功率為1865瓦特,則其輸出馬力數為多少? (註:1馬力=746瓦特) (A)1.8 (B)2 (C)2.2 (D)1492。
17. 有關於工科技藝競賽機器人職種的機構件有何規定? (A)限使用單一品牌積木構成 (B)限使用指定品牌積木建構而成 (C)可以使用伺服馬達與步進馬達 (D)最多可以使用六個伺服馬達。
18. 請問「無人水下載具」的英文為何? (A)Unmanned Aerial Vehicle (UAV) (B)Unmanned Ground Vehicle (UGV) (C)Unmanned Underwater Vehicle (UUV) (D)以上皆非。
19. 虛擬碼(Pseudo-code)通常只描述動作(action),而不包括下列何者: (A)宣告 Declarations (B)輸入輸出 Input/output (C)演算法 Algorithms (D)控制結構 Control structures。
20. 機器人的構造多來自於模仿生物界的功能、智能和行為,以人體構造為類比,人體骨骼功能為組構支撐人體的骨架、保護內臟和產生動作。請問下列機器人的架構中,何者可等同於人體骨骼功能? (A)機械模組 (B)控制模組 (C)傳感模組 (D)能源模組。
21. 一般影像處理常會把RGB影像轉換為HSV系統。請問其中的V代表什麼意義? (A)飽和度 (B)色相 (C)亮度 (D)彩度。
22. 機器人所使用的輪子中,麥克納姆輪又稱為何種輪子? (A)越野輪 (B)萬向輪 (C)全向輪 (D)風火輪。
23. 機器人要抓住罐頭並舉起來,以下哪一種元件有助於抓力之控制? (A)加速度計 (B)壓力感測器 (C)震動感測器 (D)觸碰感測器。
24. 全向輪有分成從動輪與主動輪,請問從動輪是在何種行動方式為主要移動? (A)旋轉前進 (B)旋轉後退 (C)不動時 (D)側向移動。
25. 北美地區最大的機器人組織為何? (A)IFR, International Federation of Robotics (B)A3, Association for Advancing Automation(C)RIA, Robotic Industries Association (D)ISR, International Symposium of Robotics。
26. 下列關於有刷直流馬達的PWM驅動原理之敘述,何者錯誤?
(A)當PWM控制信號處於高電位(On)時,將對馬達外加電壓。 (B)當PWM控制信號處於低電位(Off)時,馬達引腳的兩端將短路。 (C)當PWM控制信號處於低電位(Off)時,線圈的電感會釋放所儲存的磁能,提供保持電流的作用。 (D)當PWM控制信號處於低電位(Off)時,在相對於電感L和電阻R的時間常數足夠短的週期內,反覆外加電壓並且馬達兩端反覆短路時(即PWM控制信號持續作用),流過的電流無法視為定值。。
27. 一個步進角為1.8度的步進馬達 (1.8°/step),試問逆時針轉90度應送幾步的控制訊號方可達成?_______ 步。(A)45 (B)50 (C)90 (D)100
28. 在齒輪系中設置惰輪,目的為何? (A)改變減速比 (B)增加傳動效率 (C)改變轉動方向 (D)減少齒輪干涉現象。
29. 如下圖所示,二輪機器人輪胎直徑為6.7公分,二輪的間距為16.8公分,請問機器人向前往左旋轉62度,請計算右輪子需要移動的距離?
(A)21cm (B)18.1cm (C)7.25cm (D)14.5cm。
30. 根據國際機器人聯盟 (International Federation of Robotics,IFR)的定義,以下何者 為非 ? (A)機器人可分為「產業用機器人」與「服務型機器人」兩大類。 (B)產業用機器人主要運用在各種製造廠房中,多半以機械手臂為主,負責焊接、組裝、搬運、包裝等自動化生產工作,可提高效能與產值。 (C)服務型機器人以保全、伴侶、醫療照護、家庭勞務、教育、休閒娛樂等方面為發展主軸。 (D)產業用機器人是未來機器人產業的發展重點,將是推動全球經濟的成長引擎。
31. 循跡自走車採用5個紅外線光反射器感測路徑狀態,若偵測到軌跡為1,未偵測到為0,則當自走車往前行走,偵測到由左至右數值為00011的感測值時,代表自走車的狀態為? (A)車身稍偏至軌跡左邊。 (B)車身稍偏至軌跡右邊。 (C)車身偏至軌跡左邊很多。 (D)車身偏至軌跡右邊很多。
32. 機器人的構造多來自於模仿生物界的功能、智能和行為,以人體構造為類比,人體骨骼功能為組構支撐人體的骨架、保護內臟和產生動作。請問下列機器人的架構中,何者可等同於人體進食以提供能量之功能? (A)機械模組 (B)控制模組 (C)傳感模組 (D)能源模組。
33. 在LabVIEW中使用case來做決策,不能使用下列何者資料型態? (A)列舉 (B)字串 (C)波形圖 (D)錯誤。
34. PyTorch深度學習開源程式庫是目前智慧機器人領域中,最常被廣泛使用的人工智慧軟體框架,下列何者非常見之應用? (A)物件方位辨識 (B)動態物體辨識與避障 (C)生成式人機互動交談 (D)判斷工件的軟硬度。
35. 彩色深度相機(RGBD Camera)與光達感測器(LiDAR Sensor)的相異處為何? (A)彩色資訊 (B)感測距離 (C)感測資料量 (D)以上皆是。
36. 台灣第一座機器人博物館,座落於哪一所大學內? (A)台北城市科技大學 (B)台灣科技大學 (C)台灣大學 (D)雲林科技大學。
37. 有關齒條齒輪的傳動,下列敘述何者正確? (A)齒輪齒條傳動是齒輪與齒輪配合的傳動方式。 (B)當齒條主動時,可以將直線運動變成旋轉運動。 (C)當齒輪主動時,可以將直線運動變成旋轉運動。 (D)無法應用於上升下降使用。
38. 機器人身上緊急開關之位置,何者應列為 首要 考慮? (A)為求美觀,應將開關裝置於隱密處 (B)為防止誤觸,應將開關裝置於有蓋的盒內 (C)為求安全,應該開關裝置於獨立的位置 (D)為因應需要,應將開關裝置於明顯且易於按到的地方。
39. 流程圖多用來描述軟體程序,請問方塊、菱形、箭號各在流程圖中代表何種工作? (A)邏輯狀況、處理步驟、控制流程。 (B)控制流程、邏輯狀況、處理步驟。 (C)處理步驟、邏輯狀況、控制流程。 (D)處理步驟、控制流程、邏輯狀況。
40. 依下圖所示其輸出結果為何?
(A)5、2、3。 (B)1、8、9。 (C)7、11、13。 (D)4、14、8。
41. 針對下圖之三輪全向底盤運動模型,若 ,ω = 0,對於底盤運動的敘述何者錯誤?
(A)朝方向直線運動 (B)輪①正轉 (C)輪②倒轉 (D)輪③正轉。
42. 要使輪型機器人能偵測平台的邊緣進而停住不跌落,可採用以下哪一種元件? (A)反射型紅外線感測器 (B)GPS (C)加速度計 (D)陀螺儀。
43. 光遮斷器的受光元件是下列何者? (A)光電晶體 (B)LED (C)二極體 (D)太陽能板。
44. 關於市面上常見電池的敘述何者錯誤? (A)鎳氫電池有較嚴重的記憶效應。 (B)鎳氫電池容易自放電。 (C)鋰電池不可充電。 (D)單顆鋰電池的額定電壓約3 V。
45. 在工科技藝競賽機器人職類中,有關機器人的「智慧判斷能力」,下列何者說明 較為合適 ? (A)機器人須以自主的方式進行工作,並且完成指定工作。 (B)機器人須要擁有解開數學題目的能力。 (C)機器人須可以配合選手操控的能力。 (D)機器人須要擁有判斷比賽時間的能力。
46. 機器人在循跡競走的比賽場地中,以下哪一種環境條件改變影響 最大 ? (A)濕度 (B)照度 (C)溫度 (D)噪音。
47. 輪型機器人左右兩輪都由伺服機驅動,而且伺服機在脈波寬度等於1.5 ms時靜止不動。要使輪型機器人直線前進,提供給左右兩輪伺服機的脈波寬度應可能為? (A)2.2 ms、2.2 ms。 (B)1.5 ms、0.8 ms。 (C)1.5 ms、2.2 ms。 (D)0.8 ms、2.2 ms。
48. ROS提供了類似作業系統的特性、共通的機器人軟體平台、統一的資訊傳輸框架;支援多種程式語言、提供視覺化模擬工具;內建多種通用演算法、提供各種感測、運動控制、空間地圖、導航路徑規劃等功能;有大量網路社群與論壇支援、有眾多第三方程式庫。以上對於ROS的描述可歸納為下咧那些特性的組合? (A)Plumbing 通信機制 + Tools 開發工具 (B)Tools 開發工具 + Capability 應用功能 (C)Capability 應用功能 + Community 社群生態系統 (D)Plumbing 通信機制 + Tools 開發工具 + Capability 應用功能 + Community 社群生態系統。
49. 二輪機器人輪胎直徑為9.8公分,請問向前直走23.2公分,輪胎旋轉了多少圈? (A)0.754 (B)0.968 (C)1.234 (D)1.548。
50. 以下對於2D光達感測器的應用之敘述,何者錯誤? (A)2D光達感測器的偵測範圍是一個平面 (B)2D光達感測器無法偵測只出現在雷射掃描高度以上的移動物體 (C)2D光達感測器利用光速和物體反射雷射的時間來計算距離 (D)2D光達感測器可以偵測高度小於雷射掃描高度的固定物體。
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A)逆、靜止、靜止、順。 (B)順、靜止、靜止、逆。 (C)順、逆、順、逆。 (D)靜止、逆、靜止、逆。
(A)逆、靜止、靜止、順。 (B)順、靜止、靜止、逆。 (C)順、逆、順、逆。 (D)靜止、逆、靜止、逆。 (B)
(B) (C)
(C) (D)
(D) 。
。 (A) 1.289(B)1.523 (C)1.658 (D)1.846。
(A) 1.289(B)1.523 (C)1.658 (D)1.846。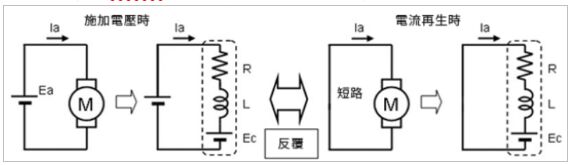 (A)當PWM控制信號處於高電位(On)時,將對馬達外加電壓。 (B)當PWM控制信號處於低電位(Off)時,馬達引腳的兩端將短路。 (C)當PWM控制信號處於低電位(Off)時,線圈的電感會釋放所儲存的磁能,提供保持電流的作用。 (D)當PWM控制信號處於低電位(Off)時,在相對於電感L和電阻R的時間常數足夠短的週期內,反覆外加電壓並且馬達兩端反覆短路時(即PWM控制信號持續作用),流過的電流無法視為定值。。
(A)當PWM控制信號處於高電位(On)時,將對馬達外加電壓。 (B)當PWM控制信號處於低電位(Off)時,馬達引腳的兩端將短路。 (C)當PWM控制信號處於低電位(Off)時,線圈的電感會釋放所儲存的磁能,提供保持電流的作用。 (D)當PWM控制信號處於低電位(Off)時,在相對於電感L和電阻R的時間常數足夠短的週期內,反覆外加電壓並且馬達兩端反覆短路時(即PWM控制信號持續作用),流過的電流無法視為定值。。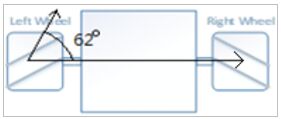 (A)21cm (B)18.1cm (C)7.25cm (D)14.5cm。
(A)21cm (B)18.1cm (C)7.25cm (D)14.5cm。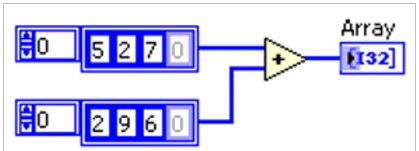 (A)5、2、3。 (B)1、8、9。 (C)7、11、13。 (D)4、14、8。
(A)5、2、3。 (B)1、8、9。 (C)7、11、13。 (D)4、14、8。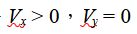 ,ω = 0,對於底盤運動的敘述何者錯誤?
,ω = 0,對於底盤運動的敘述何者錯誤?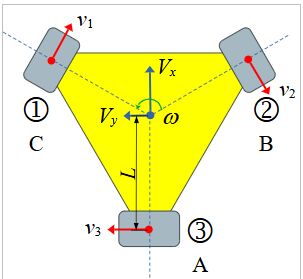 (A)朝
(A)朝 方向直線運動 (B)輪①正轉 (C)輪②倒轉 (D)輪③正轉。
方向直線運動 (B)輪①正轉 (C)輪②倒轉 (D)輪③正轉。