題組內容
4. A servo control system is designed with 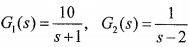 , and the state variable x1 and x2 are defined, as shown in Fig.4.
, and the state variable x1 and x2 are defined, as shown in Fig.4.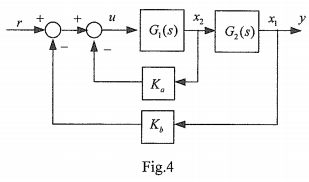
(b)Please solve the gain Ka and K, for the closed-loop poles located at-2 ± j2.(15%)
 阿摩線上測驗
登入
阿摩線上測驗
登入
4. A servo control system is designed with , and the state variable x1 and x2 are defined, as shown in Fig.4.
(b)Please solve the gain Ka and K, for the closed-loop poles located at-2 ± j2.(15%)