所屬科目:國營事業◆自動控制
1.信號流程圖如【圖 1】所示,其輸出入關係為何?
(A) (B) (C)(D)
2.特性方程式 △(s)=s3-6s2+11s-6=0 ,有多少個根在 s 右半平面? (A) 1 (B) 2 (C) 3 (D) 4
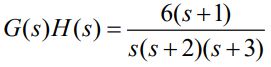
3.請考慮開迴路轉移函數為 ,試求斜坡誤差常數為何? (A) 1 (B) 2 (C) 3 (D) ∞
4.關於以下函數 的零點和極點,下列何者正確? (A)零點:0、-1±j1 (B)零點:0、-1、-2 (C)極點:-1±j1 (D)極點:0、-1、-2
5.關於典型線性非時變系統的步級響應定義,下列敘述何者錯誤? (A)尖峰時間:步級響應上升到第一個峰值所需的時間 (B)上升時間:步級響應從終值 10%上升至終值的 90%所需時間 (C)最大超越量:步級響應最大值減去穩態值 (D)系統時間常數:步級響應從 0%上升至最終值的 50%所需時間
6.一個時間函數為 ,拉氏轉換後為下列何者? (A) (B) (C) (D)
7. ,求。 (A) (B) (C) (D)
8.【圖 8】為非反相放大器電路,試求轉移函數 ? (A) (B)(C) (D)
9.系統的開迴路轉移函數為 ,其中 K ≥ 0 ,請問根軌跡的終點在何處? (A) 0、-2 (B) 0、-4 (C) -4、∞ (D) 0、∞
10.開迴路轉移函數 ,其中 a >0 ,K> 0 ,請問根軌跡的形狀為何? (A)圓形 (B)十字型 (C)橢圓形 (D)心形
11.對於控制系統之暫態及穩態響應,下列敘述何者正確? (A)穩態響應無法衡量系統的精確性 (B)控制系統的時間響應僅包含暫態響應 (C)安定時間屬於穩態響應 (D)暫態響應是由單位步級輸入所產生響應來定義
12.關於阻尼比 ζ,下列敘述何者正確? (A)無阻尼(ζ=0):轉移函數的極點發生在負實軸上 (B)欠阻尼(0<ζ<1):輸出響應無震盪到達目標值 (C)臨界阻尼(ζ=1):輸出響應到達穩定前,會在目標值附近來回振動數次 (D)過阻尼(ζ>1):轉移函數的極點為不相等的負實根
13.關於根軌跡,下列敘述何者錯誤? (A)根軌跡的起點在開迴路轉移函數的極點 (B)根軌跡的終點在開迴路轉移函數的零點 (C)增加極點將使原來根軌跡推向 s 平面右半平面效應 (D)增加零點將使原來根軌跡推向 s 平面右半平面效應
14.關於羅斯-赫維茲穩定準則,下列敘述何者錯誤? (A)系統要穩定其特性方程式所有根,均必位於 s 平面左半平面 (B)當羅斯表任一列的第一行數字為零時,即以任意小的常數來取代 (C)當羅斯表任一列的數字均為零時,須藉輔助方程式往下算 (D)當羅斯表第一行數字具有相同符號,表示所有根均位於 s 平面的右半平面
15.下列何者非判斷線性非時變系統穩定性的方法? (A)羅斯-赫維茲穩定準則 (B)奈氏準則 (C)信號流程圖 (D)波德圖
16.對於控制系統中 s 平面映射至 z 平面的關係,下列敘述何者正確? (A) (B) (C) (D)
17.關於信號流程圖,下列專有名詞之解釋何者錯誤? (A)節點:代表輸入、輸出或信號流程之接點 (B)分支:兩節點間的有向線段 (C)信號流程圖可適用線性及非線性系統 (D)迴路:路徑起點與終點同一節點,且路徑節點僅可經過一次
18.關於根軌跡法,下列敘述何者錯誤? (A)係指開迴路某一參數變化時,閉迴路特性根在 s 平面上移動的軌跡 (B)適用於線性時變系統 (C)開迴路轉移函數是複變數 s 平面函數 (D)根軌跡與互補根軌跡構成完整根軌跡
19.請考慮線性非時變系統 ,其中 ,C = [0 1] ,試判別系統下列何者正確? (A)可控制且可觀測 (B)可控制且不可觀測 (C)不可控制且可觀測 (D)不可控制且不可觀測
20.請考慮單輸入/單輸出閉迴路系統如【圖 20】所示,其中 ,。試求閉迴路轉移函數 M (s) 為何? (A) (B)(C) (D)
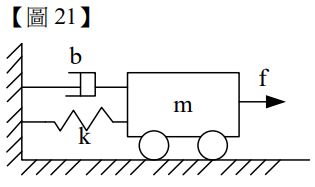
21.如【圖 21】所示,下列機械系統之數學模型為何?(其中 k 為彈簧之彈力常數,b 為阻尼器之黏滯阻尼係數,m 為 質量,f 為外力,且考慮輪子與地面無摩擦力)
(A) mx’’+bx’-kx=f (B) mx’’+kx’-bx=f (C) mx’’+bx’+kx=f (D) mx’’+kx’+bx=f
22.如【圖 22】所示,電路系統之轉移函數為何?
(A)(B) (C)(D)
23.對一個二階系統 ,下列哪一個條件可使得系統成為過阻尼系統? (A) a2-4 bc >4 (B) b2-4ac> 0 (C) c2-4 ab > 0 (D) a > 0
24.請考慮一個一階系統 ,則輸入為單位步階時,輸出之時間響應為何? (A) (B) (C) (D)
25.若一個系統之特性方程式為 S3+20S2+2S+200 ,則此系統之穩定性為何? (A)邊界穩定 (B)條件穩定 (C)不穩定 (D)穩定
26.試以羅斯穩定準則判斷右方特性方程式 S3+3S2+2S+1=0 ,共有幾個在 s 平面右半面之特性根? (A) 0 (B) 1 (C) 2 (D) 3
27.請考慮一個回授系統如【圖 27】,其中,K > 0,則下列何者非其根軌跡漸近線之角度?
(A) 0 度 (B) 60 度 (C) 180 度 (D) 300 度
28.請考慮一個回授系統如【圖 28】,其中,K > 0,則其根軌跡漸近線之交點為何?
(A) -0.5 (B) -1 (C) -1.5 (D) -2
29.請考慮一個線性系統如右,,則此系統具有下列哪一項性質? (A)不可控制,不可觀測 (B)可控制,不可觀測 (C)不可控制,可觀測 (D)可控制,可觀測
30.請考慮一個線性系統如右, ,則此系統具有下列哪一項性質? (A)不可控制,不可觀測 (B)不可控制,可觀測 (C)可控制,不可觀測 (D)可控制,可觀測
31.請考慮一個系統之波德圖如【圖 31】,則此系統之轉移函數為何?
(A) 1+ j ωT (B) 1/ (1+jωT ) (C) j ωT (D) 1/ j ωT
32.請考慮一個系統之波德圖如【圖 32】,則此系統之轉移函數為何(T=1)?
33. PID 控制器之轉移函數,如何調整參數來降低二階系統之暫態響應的超越量? (A)將增大 (B)將增大 (C)將增大 (D)將 減小
34.在 PID 控制器之轉移函數,若要改善穩態誤差,必須調整哪些參數? (A) (B)(C)(D)
35.請考慮一個穩定的系統,則其頻率響應的 G.M.(增益邊界)與 P.M.(相位邊界)必須滿足下列何項條件? (A) G.M.<0 且 P.M.>0 (B) G.M.<0 且 P.M.<0 (C) G.M.>0 且 P.M.<0 (D) G.M.>0 且 P.M.>0
36.在一個系統之頻率響應中,其頻寬 b 的定義為何? (A) (B) (C) (D)
37.根據 Shannon 取樣定理,對於一個有限頻寬的信號,其取樣率必須大於最高頻率的幾倍,才能從取樣中重建原來的 信號? (A) 1 倍 (B) 2 倍 (C) 3 倍 (D) 4 倍
38.在數位系統中,此轉移函數 ,代表著下列哪一種補償器? (A)離散微分器 (B)離散積分器 (C)離散加法器 (D)離散放大器
39.單位步階函數 u(t)經過 z-轉換後,在數位系統中之 U(z)=? (A) (B) (C) (D)
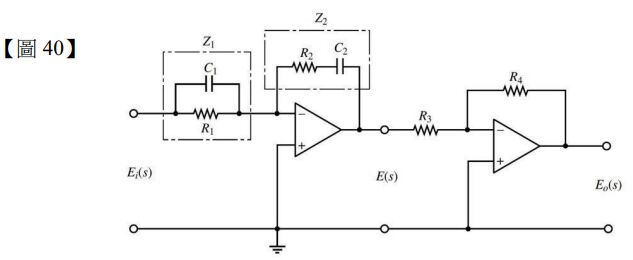
40.如【圖 40】此電路系統屬於下列何種系統?
(A)帶通濾波器 (B)高通濾波器 (C) PID 控制器 (D)相位落後補償
41.關於穩態誤差,下列敘述何者正確? (A)系統存在有穩態誤差,表示系統的準確性好 (B)穩態誤差的產生是由系統線性元件所造成 (C)穩態誤差值的大小,與系統本身的特性有關,與測試訊號的形式無關 (D)穩態誤差定義:,E(s)為誤差函數
42.關於奈氏穩定準則的特點,下列敘述何者正確? (A)由閉迴路轉移函數的頻率響應曲線決定系統穩定度 (B)適用範圍可擴及非線性系統 (C)奈氏準則的必要條件為 或常數 (D)穩定閉迴路系統可以有F(s)=1+G(s)H(s)=0的零點位於 s 右半平面或虛軸上
43.若 y (t)= tu(t) ,則下列敘述何者正確? (A)線性時變系統 (B)線性非時變系統 (C)非線性時變系統 (D)非線性非時變系統
44.關於回授控制系統誤差函數,下列敘述何者錯誤? (A)步級誤差常數(B)步級輸入為 之穩態誤差 (C)斜坡誤差常數 (D)斜坡輸入為之穩態誤差
45.關於 PID 控制器,下列敘述何者錯誤? (A)積分控制增加系統型式改善穩態誤差 (B)積分控制使系統變慢且變得不穩定 (C)微分控制使系統變慢減少系統阻尼 (D)微分控制可以改善系統穩定性
46.關於時域性能規格,下列敘述何者錯誤? (A)穩態誤差衡量追踪精度 (B)上升時間衡量相對穩定性 (C)安定時間衡量穩態響應速度 (D)系統阻尼衡量暫態響應型態
47.考慮矩陣 ,若其解關係式為 ,試問下列解何者正確? (A) (B) (C) (D)
48.有關相位超前控制器,下列敘述何者正確? (A)對系統的穩態誤差影響很大 (B)可減小步級響應的最大超越量及上升時間 (C)無法增加閉迴路系統的頻寬 (D)相位邊限無法獲得改善
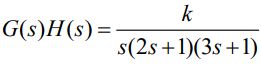
49.系統開迴路轉移函數為 ,請問下列選項中的 k 值何者不在穩定區間內? (A) (B) (C) (D)
50.關於 z 轉換,試求 Z [kT ] =? (A)(B) (C) (D)
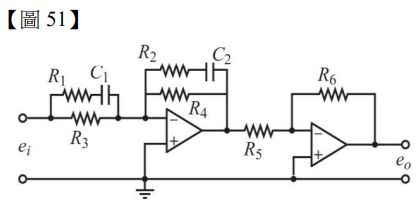
51.如【圖 51】所示,此電路系統屬於下列何種系統?
(A) PID 控制器 (B)相位落後補償 (C)相位領先補償 (D)相位落後領先補償
52.如【圖 52】所示之電路系統屬於下列何種系統?
(A) PID 控制器 (B)高通濾波器 (C)相位領先補償 (D)低通濾波器
53.考慮一個回授系統如【圖 53】,其中H(s)=1,,則位移誤差常數 Kp=?
(A) 0 (B) 50 (C) 100 (D) 150
54.請考慮一個回授系統如【圖 54】所示,其中H(s)=1,,則當輸入為單位斜坡函數時,其穩態誤差 為何?
(A) 0 (B) 0.1 (C) 0.2 (D) 1/11
55.若一個系統之特性方程式為s3+20s2+9s+400=0 ,則此系統之特性根在 s 平面之右半面共有幾個? (A) 0 (B) 1 (C) 2 (D) 3
56.請考慮一個回授系統如【圖 56】所示,其中,K > 0,則其根軌跡漸近線之交點為何?
(A) 0 (B) -1 (C) -2 (D) -3
57.請考慮一個線性系統如右, ,則此系統之特性方程式為何?
(A)3s2+2s+1=0 (B) s2+3s+1=0 (C) 2s2+3s-5=0 (D) 3s2+2s-5=0
58.考慮一個系統之特性方程式為 s4+2s3+(4+K)s2+9s+25=0 ,當 K 滿足下列哪一個條件時,則系統是穩定的? (A) K>20/9 (B) K<20/9 (C) K>109/18 (D) K<109/18
59.請考慮一個回授系統如【圖 59】所示,其中H(s)=1,,則其根軌跡之分離點為何?
(A) -0.467 (B) -2.067 (C) -1.523 (D) -1.642
60.由【圖 60】所示頻率響應之極座標圖來看,此系統之轉移函數為何?
(A)1+ j ωT (B) j ωT/(1+ jωT)(C)1/ (1 + j ωT) (D)1/ jω T
 阿摩線上測驗
登入
阿摩線上測驗
登入
 為何?
為何?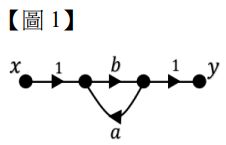 (A)
(A)  (B)
(B) (C)
(C) (D)
(D)
 ,試求斜坡誤差常數為何? (A) 1 (B) 2 (C) 3 (D) ∞
,試求斜坡誤差常數為何? (A) 1 (B) 2 (C) 3 (D) ∞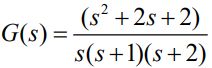 的零點和極點,下列何者正確? (A)零點:0、-1±j1 (B)零點:0、-1、-2 (C)極點:-1±j1 (D)極點:0、-1、-2
的零點和極點,下列何者正確? (A)零點:0、-1±j1 (B)零點:0、-1、-2 (C)極點:-1±j1 (D)極點:0、-1、-2 ,拉氏轉換後為下列何者? (A)
,拉氏轉換後為下列何者? (A) (B)
(B) (C)
(C)  (D)
(D) 
 ,求
,求 。 (A)
。 (A) (B)
(B) (C)
(C) (D)
(D)
 ? (A)
? (A) (B)
(B) (C)
(C) (D)
(D)
 ,其中 K ≥ 0 ,請問根軌跡的終點在何處? (A) 0、-2 (B) 0、-4 (C) -4、∞ (D) 0、∞
,其中 K ≥ 0 ,請問根軌跡的終點在何處? (A) 0、-2 (B) 0、-4 (C) -4、∞ (D) 0、∞ ,其中 a >0 ,K> 0 ,請問根軌跡的形狀為何? (A)圓形 (B)十字型 (C)橢圓形 (D)心形
,其中 a >0 ,K> 0 ,請問根軌跡的形狀為何? (A)圓形 (B)十字型 (C)橢圓形 (D)心形 (B)
(B) (C)
(C) (D)
(D) 
 ,其中
,其中  ,C = [0 1] ,試判別系統下列何者正確? (A)可控制且可觀測 (B)可控制且不可觀測 (C)不可控制且可觀測 (D)不可控制且不可觀測
,C = [0 1] ,試判別系統下列何者正確? (A)可控制且可觀測 (B)可控制且不可觀測 (C)不可控制且可觀測 (D)不可控制且不可觀測 ,
, 。試求閉迴路轉移函數 M (s) 為何? (A)
。試求閉迴路轉移函數 M (s) 為何? (A) (B)
(B) (C)
(C) (D)
(D)
 (A) mx’’+bx’-kx=f (B) mx’’+kx’-bx=f (C) mx’’+bx’+kx=f (D) mx’’+kx’+bx=f
(A) mx’’+bx’-kx=f (B) mx’’+kx’-bx=f (C) mx’’+bx’+kx=f (D) mx’’+kx’+bx=f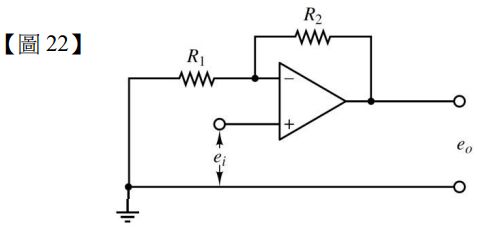 (A)
(A) (B)
(B) (C)
(C) (D)
(D)
 ,下列哪一個條件可使得系統成為過阻尼系統? (A) a2-4 bc >4 (B) b2-4ac> 0 (C) c2-4 ab > 0 (D) a > 0
,下列哪一個條件可使得系統成為過阻尼系統? (A) a2-4 bc >4 (B) b2-4ac> 0 (C) c2-4 ab > 0 (D) a > 0 ,則輸入為單位步階時,輸出之時間響應為何? (A)
,則輸入為單位步階時,輸出之時間響應為何? (A) (B)
(B) (C)
(C) (D)
(D)
 ,K > 0,則下列何者非其根軌跡漸近線之角度?
,K > 0,則下列何者非其根軌跡漸近線之角度?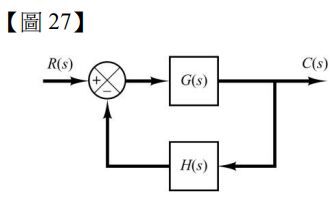 (A) 0 度 (B) 60 度 (C) 180 度 (D) 300 度
(A) 0 度 (B) 60 度 (C) 180 度 (D) 300 度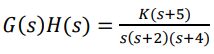 ,K > 0,則其根軌跡漸近線之交點為何?
,K > 0,則其根軌跡漸近線之交點為何?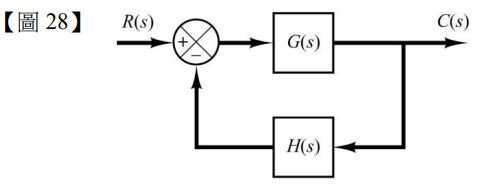 (A) -0.5 (B) -1 (C) -1.5 (D) -2
(A) -0.5 (B) -1 (C) -1.5 (D) -2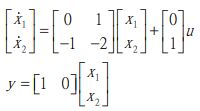 ,則此系統具有下列哪一項性質? (A)不可控制,不可觀測 (B)可控制,不可觀測 (C)不可控制,可觀測 (D)可控制,可觀測
,則此系統具有下列哪一項性質? (A)不可控制,不可觀測 (B)可控制,不可觀測 (C)不可控制,可觀測 (D)可控制,可觀測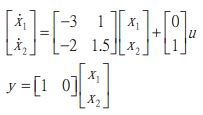 ,則此系統具有下列哪一項性質? (A)不可控制,不可觀測 (B)不可控制,可觀測 (C)可控制,不可觀測 (D)可控制,可觀測
,則此系統具有下列哪一項性質? (A)不可控制,不可觀測 (B)不可控制,可觀測 (C)可控制,不可觀測 (D)可控制,可觀測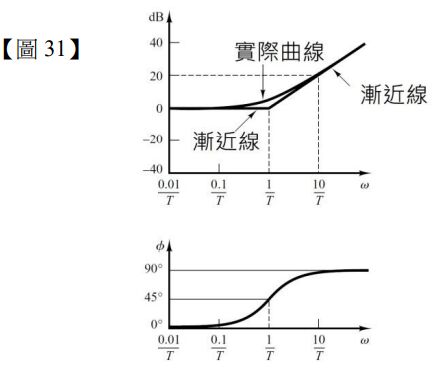 (A) 1+ j ωT (B) 1/ (1+jωT ) (C) j ωT (D) 1/ j ωT
(A) 1+ j ωT (B) 1/ (1+jωT ) (C) j ωT (D) 1/ j ωT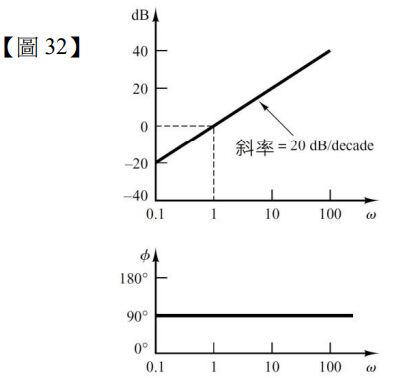 (A) 1+ j ωT (B) 1/ (1+jωT ) (C) j ωT (D) 1/ j ωT
(A) 1+ j ωT (B) 1/ (1+jωT ) (C) j ωT (D) 1/ j ωT ,如何調整參數來降低二階系統之暫態響應的超越量? (A)將
,如何調整參數來降低二階系統之暫態響應的超越量? (A)將 增大 (B)將
增大 (B)將 增大 (C)將
增大 (C)將 增大 (D)將
增大 (D)將  減小
減小 ,若要改善穩態誤差,必須調整哪些參數? (A)
,若要改善穩態誤差,必須調整哪些參數? (A) (B)
(B) (C)
(C) (D)
(D)
 (B)
(B) (C)
(C)  (D)
(D)
 ,代表著下列哪一種補償器? (A)離散微分器 (B)離散積分器 (C)離散加法器 (D)離散放大器
,代表著下列哪一種補償器? (A)離散微分器 (B)離散積分器 (C)離散加法器 (D)離散放大器 (B)
(B)  (C)
(C) (D)
(D)
 (A)帶通濾波器 (B)高通濾波器 (C) PID 控制器 (D)相位落後補償
(A)帶通濾波器 (B)高通濾波器 (C) PID 控制器 (D)相位落後補償  ,E(s)為誤差函數
,E(s)為誤差函數 或常數 (D)穩定閉迴路系統可以有F(s)=1+G(s)H(s)=0的零點位於 s 右半平面或虛軸上
或常數 (D)穩定閉迴路系統可以有F(s)=1+G(s)H(s)=0的零點位於 s 右半平面或虛軸上 ,下列敘述何者錯誤? (A)步級誤差常數
,下列敘述何者錯誤? (A)步級誤差常數 (B)步級輸入為
(B)步級輸入為 之穩態誤差
之穩態誤差 (C)斜坡誤差常數
(C)斜坡誤差常數 (D)斜坡輸入為
(D)斜坡輸入為 之穩態誤差
之穩態誤差
 ,若其解關係式為
,若其解關係式為 ,試問下列解何者正確? (A)
,試問下列解何者正確? (A) (B)
(B) (C)
(C) (D)
(D)
 ,請問下列選項中的 k 值何者不在穩定區間內? (A)
,請問下列選項中的 k 值何者不在穩定區間內? (A)  (B)
(B) (C)
(C) (D)
(D)
 (B)
(B) (C)
(C)  (D)
(D) 
 (A) PID 控制器 (B)相位落後補償 (C)相位領先補償 (D)相位落後領先補償
(A) PID 控制器 (B)相位落後補償 (C)相位領先補償 (D)相位落後領先補償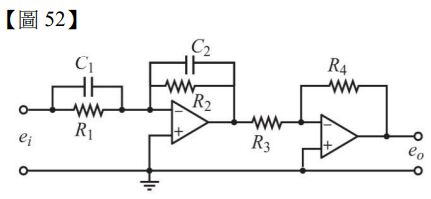 (A) PID 控制器 (B)高通濾波器 (C)相位領先補償 (D)低通濾波器
(A) PID 控制器 (B)高通濾波器 (C)相位領先補償 (D)低通濾波器 ,則位移誤差常數 Kp=?
,則位移誤差常數 Kp=?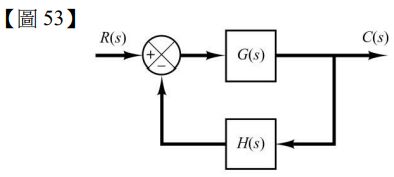 (A) 0 (B) 50 (C) 100 (D) 150
(A) 0 (B) 50 (C) 100 (D) 150 ,則當輸入為單位斜坡函數時,其穩態誤差 為何?
,則當輸入為單位斜坡函數時,其穩態誤差 為何?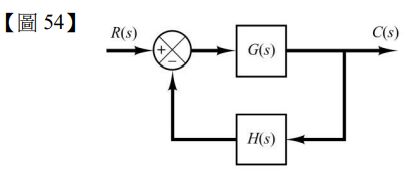 (A) 0 (B) 0.1 (C) 0.2 (D) 1/11
(A) 0 (B) 0.1 (C) 0.2 (D) 1/11 ,K > 0,則其根軌跡漸近線之交點為何?
,K > 0,則其根軌跡漸近線之交點為何?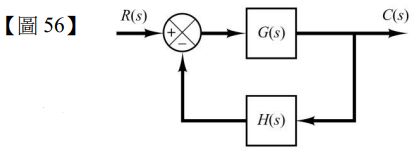 (A) 0 (B) -1 (C) -2 (D) -3
(A) 0 (B) -1 (C) -2 (D) -3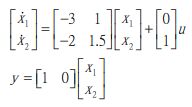 (A)3s2+2s+1=0 (B) s2+3s+1=0 (C) 2s2+3s-5=0 (D) 3s2+2s-5=0
(A)3s2+2s+1=0 (B) s2+3s+1=0 (C) 2s2+3s-5=0 (D) 3s2+2s-5=0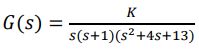 ,則其根軌跡之分離點為何?
,則其根軌跡之分離點為何?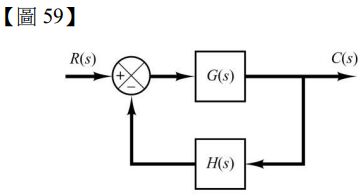 (A) -0.467 (B) -2.067 (C) -1.523 (D) -1.642
(A) -0.467 (B) -2.067 (C) -1.523 (D) -1.642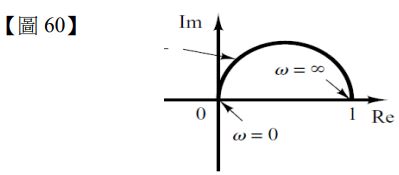 (A)1+ j ωT (B) j ωT/(1+ jωT)(C)1/ (1 + j ωT) (D)1/ jω T
(A)1+ j ωT (B) j ωT/(1+ jωT)(C)1/ (1 + j ωT) (D)1/ jω T