所屬科目:國營事業◆自動控制
1. 開迴路系統不包含下列何種元件?(A) 控制器 (B) 致動器 (C) 比較器 (D) 製程系統
2. 閉迴路系統與開迴路系統的組成元件的最大差異為何?(A) 控制器 (B) 比較器 (C) 致動器 (D) 製程系統
3. 下面哪一種為控制系統的時域設計法?(A) 波德圖 (B) 狀態空間方程式 (C) 奈氏圖 (D) 尼可圖
4. 控制系統之 type number 與位置誤差常數 Kp 會決定系統的穩態誤差;考慮一個系統為 type 0 的系統,則相對於步級輸入 r(t)=A 的穩態誤差為何? (A) A/Kp (B) A/(1+Kp) (C) 無限大 (D) Kp/A
5. 考慮一個系統為 type 0 的系統,若位置誤差常數為 Kp 時,則相對於斜坡輸入 r(t)=At 的穩態誤差為何? (A) A/Kp (B) A/(1+Kp) (C) 無限大 (D) Kp/A
6. 考慮一個系統為 type 2 的系統,若加速度誤差常數為 Ka 時,則相對於步階輸入 r(t)=A 的穩態誤差為何? (A) A/Ka (B) A/(1+Ka) (C) 無限大 (D) 0
7. 考慮一個系統為 type 0 的系統,若位置誤差常數為 Kp 時,則相對於拋物線輸入 r(t)=At2 /2 的穩態誤差為何? (A) A/Kp (B) A/(1+Kp) (C) 無限大 (D) Kp/A
8. 如圖 8 所示,運算放大器電路屬於哪一種控制器?(A) 比例控制器 (B) 比例微分控制器(C) 積分控制器 (D) 比例積分控制器(E)一律給分
9. 如圖 9 所示,運算放大器電路屬於哪一種控制器?(A) 比例控制器 (B) 比例微分控制器(C) 積分控制器 (D) 比例積分控制器(E)一律給分
10. 下列何者為線性系統? (A) y(t)=2u(t)+1 (B) y(t)=u2 (t) (C) y(t)=3u(t) (D) y(t)= 2u2 (t)+1
11. 考慮一個系統為 type 2 的系統,若加速度誤差常數為 Ka 時,則相對於拋物線輸入 r(t)=At2 /2 的穩態誤差為何? (A) A/(1+Ka) (B) 0 (C) 無限大 (D) A/Ka
12. 考慮 G(s)=(s+5)/(s+2)(s+3)(s+4),下列敘述何者為錯誤?(A) s=-5 為 G(s)的極點 (B) s=-2 為 G(s)的極點(C) s=-3 為 G(s)的極點 (D) s=-4 為 G(s)的極點
13. 求轉移函數 G(s)=Vo(s)/Vi(s)=?(A) (B) (C)(D) 1+RCs
14. 承第 13 題,若 R=1KΩ,C=1000µF,則系統的極點為何?(A) -100 (B) -10 (C) -5 (D) -1
15. 則下列何者為此系統之極點?(A) -2 (B) -2.5 (C) -3 (D) -5
16. 承第 15 題,則此系統的阻尼比為何?(A) 0.9 (B) 1 (C) 1.06 (D) 1.2
17. 的拉氏轉換為何?(A) 1/(s+a) (B) n!/(s+a)n (C) (n+1)!/(s+a)n+1 (D) n!/(s+a)n+1
18. 考慮一個系統為 type 1 的系統,若速度誤差常數為 Kv 時,則相對於斜坡輸入 r(t)=At 的穩態誤差為何? (A) A/Kv (B) A/(1+Kv) (C) 無限大 (D) 0
19. 一個系統之轉移函數為 6/(s2 +5s+10) ,則此系統步階響應之安定時間(2% 終值誤差範圍)為何? (A) 1.33 (B) 1.5 (C) 1.6 (D) 1.8
20. 一個系統之轉移函數為 1/(s2 +7s+8) ,下列敘述何者正確? (A) 此系統為過阻尼系統 (B) 此系統為臨界阻尼系統 (C) 此系統為低阻尼系統 (D) 此系統之步階響應發生振盪
21. 一個系統如圖 21 所示,若 G(s)=1/( s2+7s+8),H(s)=1,則單位步階輸入時的穩態誤差為何?(A) 2/3(B) 3/4(C) 7/8(D) 8/9
22. 一個系統如圖 22 所示,若 G(s)=1/( s2 +7s+8),H(s)=1,則斜坡輸入 r(t)=At 時的穩態誤差為何? (A) 2/3 (B) 3/4 (C) 7/8 (D) 無限大
23. 一個系統如圖 23 所示,若 G(s) =,H(s)=1,則拋物線輸 入 r(t)=At 時的穩態誤差為何? (A) 0 (B) A/8 (C) 8A (D) 無限大(E)一律給分
24. 一個系統如圖 24 所示,若 G(s) = ,H(s)=1,則斜坡輸入 r(t)=At 時的穩態誤差為何?(A) 0 (B) A/8 (C) 8A (D) 無限大
25. 一個系統如圖 25 所示,若 G(s) = ,H(s)=1,則斜坡輸入 r(t)=At 時的穩態誤差為何? (A) 0 (B) A/8 (C) 8A (D) 無限大
26. 考慮閉迴路系統之特性方程式∆(s)=s3 + 2s2 + 4s + K = 0 則系統穩定的條件為何? (A) K<0 (B) K>3 (C) 0<K<3 (D) 0<K<8
27. 考慮一個彈簧質量阻尼的系統(如圖 27),其系統的轉移函數為何?(A) (B) (C) (D)
28. 考慮一個系統的轉移函數為 ,則系統的阻尼比為何? (A) 0.5 (B) 0.7 (C) 1.75 (D) 2
29. 特性方程式為:1+KG(s)=0,K 為可調的增益值,G(s)= ,下列何 者會造成系統不穩定? (A) K=3 (B) K=5 (C) K=7 (D) K=10
30. 有關穩態誤差 ess,下列敘述何者正確?(A) type 0 的系統,其斜坡輸入之穩態誤差為 0(B) type 1 的系統,其斜坡輸入之穩態誤差為 0(C) type 2 的系統,其斜坡輸入之穩態誤差為 0(D) type 0 的系統,其步級輸入的穩態誤差為無限大
31. 一個系統之微分方程式為y”(t)+3y’(t)+7y(t)=3r(t),輸入為rt),輸出為 y(t),則此系統之特性方程式為何? (A) 3/(s2 +3s+7) (B) 1/(s2 +3s+7) (C) s2 +3s+7=0 (D) s2 +3s+7=3
32. 考慮一個系統為 type 2 的系統,若加速度誤差常數為 Ka 時,則相對於斜坡輸入 r(t)=At 的穩態誤差為何? (A) A/(1+Ka) (B) 0 (C) 無限大 (D) A/Ka
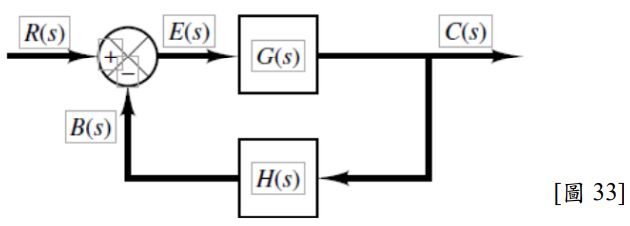
33. 如圖 33 所示系統,則此系統之轉移函數 G(s) = = ? (A) 1 / (1+GH(s)) (B) 1/ (1−GH(s)) (C)G(s)/ (1+GH(s)) (D) G(s)/ (1−GH(s))
34. 如圖 34 所示系統,則此系統之轉移函數 G(s) = = ? (A) 1 / (1+GH(s)) (B) 1/ (1−GH(s)) (C)G(s)/ (1+GH(s)) (D)G(s)/ (1−GH(s))
35. 一系統之特性方程式為 1+KG(s) = 0,G(s) = ,K 為 0~∞之可調增益,則下列 K 值何者可使系統穩定? (A) K=-3 (B) K=1 (C) K=3 (D) K=10
36. 考慮一個彈簧質量阻尼的系統(如圖 36),其系統的轉移函數為何? (A) (B)(C)(D)
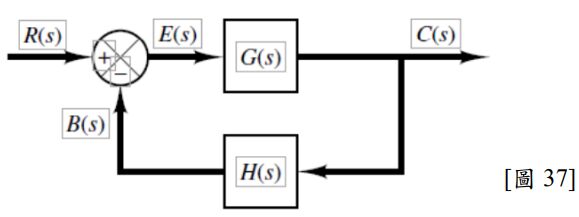
37. 考慮一個閉迴路轉移函數,如圖 37,其中 G(s)=1/(s+5),H(s)=1/s,則其系統之誤差轉移函數 =? (A) (B) (C) (D)
38. 轉移函數為1/(s2 + 5s + 1),其阻尼比為多少?(A) 5 (B) 2 (C) 2.5 (D) 1
39. 下列何者不是屬於線性系統分析工具?(A) 根軌跡圖 (B) 波德圖 (C) 相平面法 (D) 奈氏圖
40. 考慮一個系統為 type 1 的系統,若速度誤差常數為 Kv 時,相對於拋物線輸 入 r(t)=At2 /2 的穩態誤差為何? (A) A/Kv (B) A/(1+Kv) (C) 無限大 (D) 0
41. 齒輪組中,其轉矩比為 T1:T2,其角位移為θ1: θ2,齒數比為 N1:N2,齒輪半徑比為 r1:r2,則下列何者為錯誤? (A) r1θ1= r2θ2 (B) T1 θ1= T2 θ2 (C) r1N2=r2N1 (D) T1N1=T2N2
42. 考慮單位回授控制系統,開迴路轉移函數為G(s)=1/(s2 +2s+1),則閉迴路的 特性方程式為何? (A) s2 +2s+1=0 (B) s2 +2s+2=0 (C) s2 +3s+1=0 (D) s2 +3s+2=0
43. 考慮G(s)=((s+5)(s+1))/((s+3)(s+5)),則下列何者為誤?(A) s=−5 稱為??(s)的零點 (B) s=−1 稱為G(s)的零點(C) s=-3 稱為??(s)的極點 (D) s=−5 並非為G(s)的極點
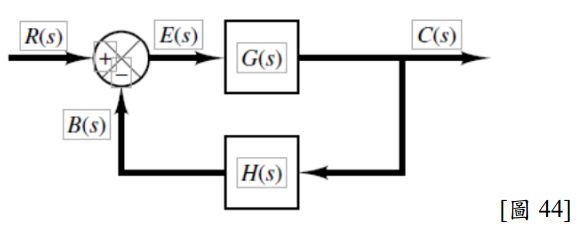
44. 考慮一個閉迴路轉移函數,如圖 44,其中 G(s)=1/(s+5)(s+2),H(s)=1/s,則 其系統之誤差轉移函數= ?(A)(B) (C) (D)
45. 考慮控制系統的特性方程式為,其特性根分佈情 形,下列敘述何者正確? (A) 兩個根在左半平面,一個根在右半平面,一個根在虛軸上 (B) 兩個根在右半平面,兩個根在左半平面 (C) 兩個根在虛軸上,兩個根在右半平面 (D) 兩個根在虛軸上,兩個根在左半平面
46. 考慮一個系統為 type 1 的系統,若速度誤差常數為 Kv 時,則相對於步階 輸入 r(t)=A 的穩態誤差為何? (A) A/Kp (B) A/(1+Kp) (C) 無限大 (D) 0
47. 已知系統之狀態方程式為,則系統對應之 特徵值為何? (A) -1 與-3 (B) 1 與 3 (C) 1 與-3 (D) -1 與 3(E)一律給分
48. 考慮一個負回授系統如圖 48,則下列何者為誤?(A) 當 K=6 時,系統不穩定(B) 根軌跡之漸進線角度為 60,180,300(C) 漸進線之交點為-1+j0(D) 當 K=8 時,系統不穩定
49. 考慮一個系統如下, ,則下 列何者為誤? (A) 系統為可控制 (B) 系統為可觀測 (C) 系統可經由狀態回授讓系統穩定 (D) 系統無法由狀態回授控制來穩定系統
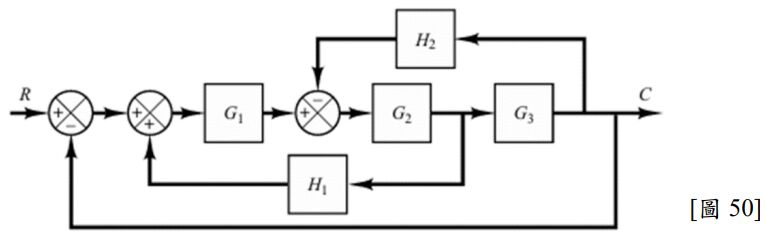
50. 考慮一個系統如圖 50,則其轉移函數 = ? (A) (B)(C) (D)
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A) 比例控制器 (B) 比例微分控制器(C) 積分控制器 (D) 比例積分控制器(E)一律給分
(A) 比例控制器 (B) 比例微分控制器(C) 積分控制器 (D) 比例積分控制器(E)一律給分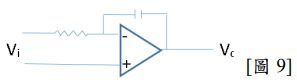 (A) 比例控制器 (B) 比例微分控制器(C) 積分控制器 (D) 比例積分控制器(E)一律給分
(A) 比例控制器 (B) 比例微分控制器(C) 積分控制器 (D) 比例積分控制器(E)一律給分 (B)
(B)  (C)
(C) (D) 1+RCs
(D) 1+RCs 的拉氏轉換為何?(A) 1/(s+a) (B) n!/(s+a)n (C) (n+1)!/(s+a)n+1 (D) n!/(s+a)n+1
的拉氏轉換為何?(A) 1/(s+a) (B) n!/(s+a)n (C) (n+1)!/(s+a)n+1 (D) n!/(s+a)n+1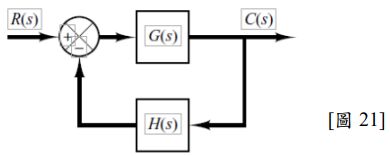 (A) 2/3(B) 3/4(C) 7/8(D) 8/9
(A) 2/3(B) 3/4(C) 7/8(D) 8/9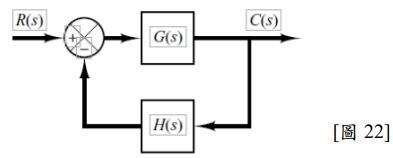 (A) 2/3 (B) 3/4 (C) 7/8 (D) 無限大
(A) 2/3 (B) 3/4 (C) 7/8 (D) 無限大 ,H(s)=1,則拋物線輸 入 r(t)=At 時的穩態誤差為何?
,H(s)=1,則拋物線輸 入 r(t)=At 時的穩態誤差為何?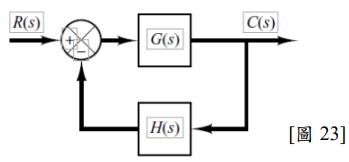 (A) 0 (B) A/8 (C) 8A (D) 無限大(E)一律給分
(A) 0 (B) A/8 (C) 8A (D) 無限大(E)一律給分 ,H(s)=1,則斜坡輸入 r(t)=At 時的穩態誤差為何?
,H(s)=1,則斜坡輸入 r(t)=At 時的穩態誤差為何?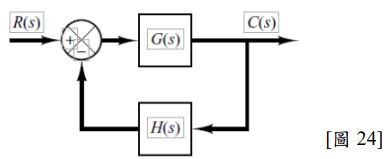 (A) 0 (B) A/8 (C) 8A (D) 無限大
(A) 0 (B) A/8 (C) 8A (D) 無限大 ,H(s)=1,則斜坡輸入 r(t)=At 時的穩態誤差為何?
,H(s)=1,則斜坡輸入 r(t)=At 時的穩態誤差為何?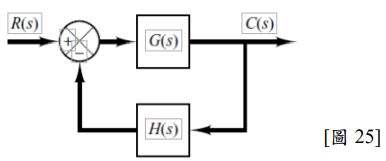 (A) 0 (B) A/8 (C) 8A (D) 無限大
(A) 0 (B) A/8 (C) 8A (D) 無限大 為何?
為何?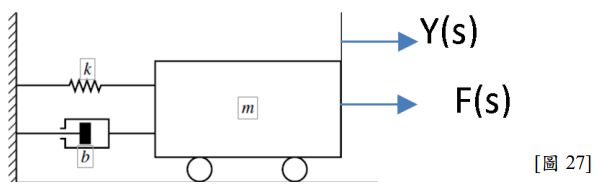 (A)
(A)  (B)
(B)  (C)
(C) (D)
(D)
 ,則系統的阻尼比為何? (A) 0.5 (B) 0.7 (C) 1.75 (D) 2
,則系統的阻尼比為何? (A) 0.5 (B) 0.7 (C) 1.75 (D) 2 ,下列何 者會造成系統不穩定? (A) K=3 (B) K=5 (C) K=7 (D) K=10
,下列何 者會造成系統不穩定? (A) K=3 (B) K=5 (C) K=7 (D) K=10 = ?
= ? (A) 1 / (1+GH(s)) (B) 1/ (1−GH(s)) (C)G(s)/ (1+GH(s)) (D) G(s)/ (1−GH(s))
(A) 1 / (1+GH(s)) (B) 1/ (1−GH(s)) (C)G(s)/ (1+GH(s)) (D) G(s)/ (1−GH(s)) = ? (A) 1 / (1+GH(s)) (B) 1/ (1−GH(s)) (C)G(s)/ (1+GH(s)) (D)G(s)/ (1−GH(s))
= ? (A) 1 / (1+GH(s)) (B) 1/ (1−GH(s)) (C)G(s)/ (1+GH(s)) (D)G(s)/ (1−GH(s))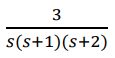 ,K 為 0~∞之可調增益,則下列 K 值何者可使系統穩定? (A) K=-3 (B) K=1 (C) K=3 (D) K=10
,K 為 0~∞之可調增益,則下列 K 值何者可使系統穩定? (A) K=-3 (B) K=1 (C) K=3 (D) K=10 為何?
為何?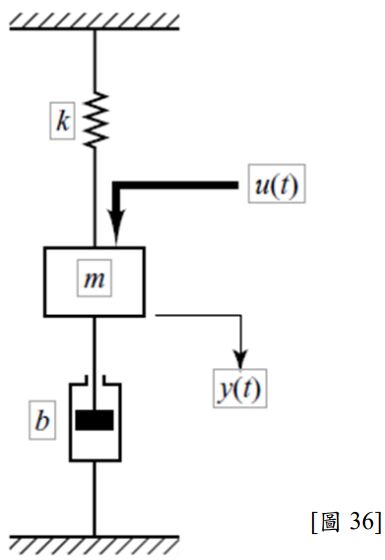 (A)
(A) 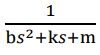 (B)
(B) (C)
(C) (D)
(D)
 =?
=?  (A)
(A) (B)
(B)  (C)
(C)  (D)
(D)
 = ?
= ? (A)
(A) (B)
(B) (C)
(C) (D)
(D)
 ,其特性根分佈情 形,下列敘述何者正確? (A) 兩個根在左半平面,一個根在右半平面,一個根在虛軸上 (B) 兩個根在右半平面,兩個根在左半平面 (C) 兩個根在虛軸上,兩個根在右半平面 (D) 兩個根在虛軸上,兩個根在左半平面
,其特性根分佈情 形,下列敘述何者正確? (A) 兩個根在左半平面,一個根在右半平面,一個根在虛軸上 (B) 兩個根在右半平面,兩個根在左半平面 (C) 兩個根在虛軸上,兩個根在右半平面 (D) 兩個根在虛軸上,兩個根在左半平面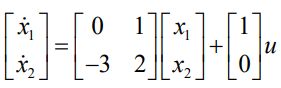 ,則系統對應之 特徵值為何? (A) -1 與-3 (B) 1 與 3 (C) 1 與-3 (D) -1 與 3(E)一律給分
,則系統對應之 特徵值為何? (A) -1 與-3 (B) 1 與 3 (C) 1 與-3 (D) -1 與 3(E)一律給分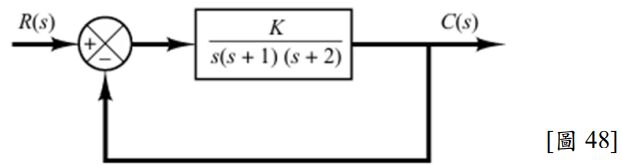 (A) 當 K=6 時,系統不穩定(B) 根軌跡之漸進線角度為 60,180,300(C) 漸進線之交點為-1+j0(D) 當 K=8 時,系統不穩定
(A) 當 K=6 時,系統不穩定(B) 根軌跡之漸進線角度為 60,180,300(C) 漸進線之交點為-1+j0(D) 當 K=8 時,系統不穩定 ,則下 列何者為誤? (A) 系統為可控制 (B) 系統為可觀測 (C) 系統可經由狀態回授讓系統穩定 (D) 系統無法由狀態回授控制來穩定系統
,則下 列何者為誤? (A) 系統為可控制 (B) 系統為可觀測 (C) 系統可經由狀態回授讓系統穩定 (D) 系統無法由狀態回授控制來穩定系統 = ?
= ? (A)
(A) 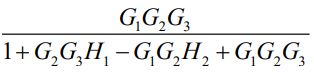 (B)
(B) (C)
(C)  (D)
(D)