所屬科目:電動車機電 整合實務
1 電動車鋰離子電池組都有一個電池管理系統來管理該鋰電池組,但電池組內的串聯電芯會有容量不一致的現象發生,下列何種問題即便有完善的電池管理系統,當串聯電芯容量不一致時,還是會發生的現象為何? (A)電芯提早過充; (B)電芯提早過放; (C)電動車里程數減少; (D)以上皆是
2 有關電動車電池保護機制之敘述,下列何者與電池保護無直接關聯?(A)車體顏色與塗裝設計;(B)電池在低溫環境下需具備溫度保護機制;(C)當電壓過高時需啟動過壓保護以避免損壞;(D)電池放電過深可能損害電池壽命,需設有過放保護
3 有關提升鋰離子電池使用壽命的措施,下列敘述何者錯誤?(A)避免經常將電池充飽至 100% SOC,以減少壽命損耗;(B)加強電池模組的冷卻和散熱設計,有助於延長電池壽命;(C)定期進行完全放電(100% DOD)有助於校正電池容量並延長壽命;(D)在電池剩餘電量未低於額定下限前即開始充電,避免過放
4 有關鋰離子電池充放電行為對電池壽命的影響,下列敘述何者錯誤?(A)頻繁進行淺充淺放,有助於延長鋰電池的循環壽命;(B)在高溫環境下進行充電會加速電池老化;(C)經常將電池充飽至 100%且長時間保持滿電狀態,不利於電池壽命;(D)鋰電池必須定期進行完全放電,以防止容量衰退
5 鋰離子電池安全考量,必須使用電池管理系統(BMS)來確保鋰離子電池的安全正常運作,下列何者非電池管理系統必需具備的電路模組? (A)電芯電壓量測電路; (B)充放電控制器電路; (C)電芯溫度量測電路; (D)電力控制模組(Power Distribution Unit)
6 鋰離子電池中,磷酸鐵鋰電池與三元鋰電池相比,下列有關耐低溫性能的敘述何者正確? (A)磷酸鐵鋰電池在低溫環境下性能較穩定,放電能力較佳; (B)三元鋰電池在低溫時的輸出功率與循環壽命優於磷酸鐵鋰電池; (C)兩者在低溫表現無明顯差異; (D)耐低溫性能主要取決於電池管理系統,電池種類影響甚微
7 有關鋰離子電池壽命與操作條件之關係,下列敘述何者有誤?(A)鋰離子電池在極低溫下進行充電,容易導致析鋰現象,影響電池壽命;(B)保持電池在單一固定溫度運作是電池熱管理的最佳策略,無需根據環境調整;(C)高倍率充電雖能提升充電效率,但長期使用將加速電池壽命劣化;(D)鋰電池的壽命與 SEI 膜的穩定性有關,過高溫度會導致 SEI 膜過度增長,引發容量衰退
8 下列何者敘述不會影響電動車電池保護?(A)車輛外型及重量;(B)電動車充電時電池需要過溫保護;(C)電動車電壓過低,需要過放保護;(D)電池充電防止過充,須過充保護
9 依據台灣「64-1 電動汽車之電氣安全」規定,有關直接接觸保護措施之敘述,下列何者正確? (A)所有可接觸之連接器皆不得在未使用工具的情況下被分離,以防止觸電危險; (B)若無需工具即可移除之部件,於拆除時其裸露部分須至少符合 IPXXD 保護等級,方為合格; (C)連接器若在分離後 1 秒內即可降至交流電 50V(rms)以下,則符合直接接觸保護規範; (D)具備 IPXXB 等級防護的可拆部件,即便無須工具即可開啟,亦可視為符合直接接 觸保護要求
10 高串聯鋰離子電池組,若使用模組化的方式組成電池組,電池管理系統的通訊架構為主從架構,在主從架構中電池管理系統進行電芯容量平衡時,以下何者正確? (A)電池模組內的平衡不由主控制系統控制; (B)電池模組都有保護開關,電池模組間的平衡可以忽略; (C)電池模組間的平衡由主控制系統控制; (D)以上皆是
11 有關鋰離子電池在低溫環境下的性能表現,下列敘述何者錯誤?(A)磷酸鐵鋰電池低溫時的內阻較三元鋰電池小,放電效率較高;(B)三元鋰電池在低溫充電時容易產生析鋰現象,可能損害電池壽命;(C)電池溫度升高會加劇電池內部副反應,縮短壽命,但對低溫充電無影響;(D)低溫會降低鋰離子電池的化學反應速率,導致輸出功率下降
12 有關可充電儲能系統(REESS)熱失控的成因,下列何者非主要原因?(A)電池過充與過放導致電性損傷;(B)強烈撞擊或擠壓引起機械損傷;(C)環境溫度劇烈變化造成溫度衝擊;(D)正常的電路斷開操作
13 有關電動車直接接觸防護等級(IP 等級)試驗工具與應用的敘述,下列何者有誤?(A) IPXXB 測試工具為模擬手指,長度 80 mm、直徑 12 mm;(B) IPXXD 測試工具為直徑 1.0 mm 的探針,用於模擬防止與細小導體接觸;(C) IPXXB 通常用於評估在無工具拆解情況下之接觸保護效果;(D) IPXXD 可作為 IP3X 的替代測試,以評估防止手指觸電的能力
14 有關電池熱管理之敘述,下列何者有誤?(A)準確量測與監控電池溫度,一旦電池溫度過高時須有效的散熱;(B)不會有有害氣體產生時,故不須通風;(C)低温條件下的快速加熱至 15℃,使電池組能夠正常工作;(D)保證電池組內溫度場的均勻分布
15 有關可充電儲能系統(REESS)熱失控發生的原因,下列何者不屬於常見誘因?(A)電池管理系統(BMS)失效導致過充或過放;(B)電池遭受外力撞擊造成內部短路;(C)電池長期處於高溫環境導致熱劣化;(D)正常電路開關動作切斷電源
16 適合電動車快充並兼具長壽命的電池,下列何者正確?(A)磷酸鐵鋰;(B)硫酸鈷;(C)鈦酸鋰;(D)硫酸鎳
17 如何提升鋰離子電池使用壽命,下列敘述何者有誤?(A)減少電池每次充飽到 100%殘電量(SOC);(B)做好電池模組的散熱設計;(C)常常將電池進行 100%深度放電(DOD);(D)電池用到額定之殘餘電量前開始充電
18 有關電動車的充電系統,下列何者有誤? (A)比重計法、開路電壓法、內阻量測法是電池容量量測方法; (B)放電曲線查表法、庫侖計量測法是電池容量量測方法; (C)交流充電樁功率較小,且車上不須配備車載充電器 (On-Board Charger),做交/直流轉換後,才能對動力電池充電; (D)以交流充電樁充電時,需搭配車上車載故障檢測 (On-Board Diagnosis)
19 某駕駛使用 CCS2 充電規格對 Hyundai IONIQ 5 進行直流快充,其鋰電池規格為 800 V / 72.6 kWh,使用的充電器為 350 kW 直流充電器,若從 20% 充電至 80%,理想 狀況下大約需多少時間?(假設實際平均充電功率約為最大功率的 70%) (A)約 8.9 分鐘; (B)約 10.5 分鐘; (C)約 12.5 分鐘; (D)約 14.3 分鐘
20 大容量電池的充電器必須考量下列何者?(A)電池之串聯與並聯數;(B)高電流的充電轉換器;(C)快速充電法;(D)以上皆是
21 CNS 規範中針對電動車輛之絕緣電阻有明確定義,直流電力系統之絕緣電阻為大於100Ω/V,交流電力系統之絕緣電阻為大於 500Ω/V,則下列何者正確?(A)直流電力系統允許漏電流小於 100mA;(B)交流電力系統允許漏電流小於 200mA;(C)電動車電池模組電壓為 360V,故絕緣電阻需大於 180kΩ 才算合格;(D)以上皆是
22 有關電動車電池組及其直流高壓端的保護設計,下列敘述何者正確?(A)電池組的正、負極均應裝設保護電路以確保安全;(B)電池組正極需裝保護電路,負極可不裝;(C)電池組負極需裝保護電路,正極可不裝;(D)電池組正負極皆不需安裝保護電路
23 有關電動車啟動時的輸出功率,下列何項特性與動力電池無直接關聯?(A)比功率(kW/kg);(B)電池的記憶效應;(C)電池的荷電狀態(SOC)及健康狀態(SOH);(D)電池的放電能力
24 某單臂繼電器的線圈匝數為 100 匝,鐵芯的磁路平均長度為 400 mm,空氣隙長度為6 mm,為使繼電器致動,空氣隙所需磁場強度為 1200 AT/m,鐵芯的磁場強度為 180 AT/m,則為使繼電器閉合,所需電流為多少安培?(參考公式:F= Hclc +Hglg= NI) (A) 0.8; (B) 0.9; (C) 1.0; (D) 1.1
25 有關電動車常用電動機之敘述,下列何者有誤?(A)永磁同步電動機常採用向量控制進行精準轉矩控制;(B)感應電動機在啟動時無需使用感測器即可運作;(C)無刷直流電動機可使用六步方波控制實現 120 度導通控制;(D)感應電動機與無刷直流電動機皆屬於直流電動機的一種
26 依據下述鋰鐵電池芯之規格表,下列敘述何者有誤?(A)最大放電能力為 10C;(B)最大充電能力為 3C;(C)無論電池狀態如何均使用 3.65V 對電池充電;(D)低於截止電壓 2.1V 即電芯無法再使用
27 油電混合車減速期間,螢幕上的箭頭顯示如下圖所示。其意義為何?(A)引擎運行的能量流向驅動輪;(B)引擎運轉並驅動電機/發電機給電池組充電;(C)來自電池組和發動機的能量被混合併流動到驅動輪;(D)來自驅動輪的能量用於電池組充電
28 有一個單臂的繼電器,線圈圈數 N 為 200 匝,若鐵的磁路平均長度 lc為 500 mm,空氣隙長度 lg 是 5 mm,為了讓繼電器致動所需要空氣隙 Hg 的磁場強度為 1000 At/m, 鐵的磁場強度 Hc 為 190 At/m;為使繼電器閉合所需電流為多少安培? (A) 0.25; (B) 0.5; (C) 1; (D) 2
1. 有一電動車整車總質量 2000 kg,於平地上等速行駛,路面輪胎滾動阻力係數 0.01,車身正投影面積 2 m2,風阻係數 0.3,空氣密度 1.23kg/m3,下列敘述何者正確? 參考公式:空氣阻力: (A)車速高於 100km/h 時,滾動阻力比空氣阻力大; (B)車速高於 90km/h 時,滾動阻力比空氣阻力大; (C)車速低於 100km/h 時,滾動阻力比空氣阻力大; (D)車速低於 80km/h 時,滾動阻力比空氣阻力大
2. 有關電動車整車控制系統(Vehicle Control Unit, VCU)的功能與應用,下列何者不屬於其主要控制範圍? (A)監控動力系統與電池管理系統之運作狀態; (B)接收駕駛操作訊號以協調車輛動力輸出; (C)偵測車輛子系統異常並進行安全保護處理; (D)提供導航系統之路徑計算與語音合成
3. 兩部電動車在相同動力輸出條件下進行彎道測試,其中車輛 A 採用前輪驅動 (FWD),車輛 B 採用後輪驅動(RWD),下列對其彎道操控特性之比較,何者正確? (A)車輛 A 在高速過彎時較易推動車輛 B 則可能出現甩尾; (B)車輛 A 轉向較靈活,車輛 B 較難進入彎道; (C)兩車彎道穩定性相同,驅動方式不影響操控性; (D)車輛 B 因為驅動在後輪,無法進行有效轉向控制
4. 一輛電動車總重量為 1800 kg,當車輛以時速 90 km/h 行駛時進行回生煞車,煞車減速度為0.5 m/s²,行駛時所受阻力總和為 600 N,電池電壓為 400 V,且若傳動與電能回收效率為 100%,則此時瞬間供給電池的回生電流約為多少安培?(A) 93.75 A;(B) 85.25 A;(C) 77.50 A;(D) 70.25 A
5. 汽車在高速行駛時,風阻力會對燃料效率產生重大影響,下列敘述何者正確?(A)風阻力與車速成線性關係,速度越快,風阻力越大,但增加不多;(B)風阻力主要與車重有關,車重越重風阻力越大;(C)風阻力與車速平方成正比,速度加倍時,風阻力約增加 4 倍;(D)風阻力與車輛高度成反比,高度越高風阻力越小
6. 一車輛透過流線造型設計使 Cd 從 0.35 降低到 0.28,若該車在 100 km/h 行駛時原風阻力為 F0,則設計優化後的風阻力約為多少? 參考公式:其中ρ是空氣密度,A 是迎風面積,Cd是風阻係數,v 是車速 (A) 0.8 F0; (B) 0.85 F0; (C) 0.9 F0 ; (D) 0.95 F0
7. 一電動車總質量 2000 kg,以 100km/hr 之定速行駛於坡度角為∅ = 5.73°的高速公路上,傳動效率為 0.9,路面輪胎滾動阻力係數 0.01,車身正投影面積為 2 m2,風阻係數為 0.3,空氣密度為 1.23kg/m3,請問該車動力電動機功率至少需要多少 kW? 參考公式:(A) 68;(B) 76;(C) 136;(D) 152
8. 有關電動車整合控制策略之敘述,下列何者正確? (A)動力控制策略依據駕駛者行為及車輛狀態進行適當動力管理,以提供良好性能與降低操作負擔; (B)電動車因系統啟動快速且不像內燃機有噪音產生,故需設計安全操作程序,以避免因誤操作而造成如暴衝等現象; (C)整車控制器需監控全車各子系統之狀態,如有系統異常則需進行失效控制策略; (D)以上皆是
9. 有一種複合電動動力系統的架構,其將電動機/發電機放在原本裝飛輪的位置,也就是在引擎與變速箱之間,而引擎與電動機/發電機間配置一離合器,此離合器的主要功能為何? (A)高速行駛時,藉由離合器的釋放,讓引擎能單獨驅動車子; (B)高速行駛時,藉由離合器的接合,讓電動機/發電機能單獨驅動車子; (C)低速行駛時,藉由離合器的接合,讓電動機/發電機可單獨驅動車子; (D)低速行駛時,藉由離合器的釋放,讓電動機/發電機可單獨驅動車子
10. 當感應電動機磁場飽和時其磁化電感於弱磁控制會產生大幅之變化,而造成向量控制 (Vector control)異常,使感應電動機之輸出扭矩不佳。有關磁場飽和問題之控制策略,下列何者有誤? (A)啟動時使用滑差速度控制; (B)定扭矩區(低轉速)使用向量控制; (C)定功率區(中轉速)使用具磁束回授之向量控制; (D)高轉速區使用滑差速度控制
11. 若直流電動機使用四象限 Chopper(截波器)驅動系統,下列何項為此控制方式可實現的完整運轉能力? (A)僅能驅動電動機正轉與停止; (B)可驅動電動機正轉與反轉,但無法回收煞車能量; (C)可驅動電動機正轉、反轉,並進行正向與反向再生制動; (D)僅可進行再生制動,無法反轉驅動
12. 在永磁同步電動機控制中,磁場導向控制(FOC)與直接轉矩控制(DTC)最大的不同點之一為何? (A) FOC 能在高速運轉時進行弱磁控制以延長速度範圍,DTC 則較少使用弱磁控制; (B) FOC 不具備弱磁控制功能,DTC 可實現弱磁控制; (C) DTC 主要用於低速區域,FOC 僅用於高速區域; (D) FOC 與 DTC 在定轉矩區和定功率區的控制策略完全相同
13. 油電混合車運轉時有各種模式,例如電動機驅動模式、引擎驅動模式、引擎充電模式等,適當的控制方式,能夠抑制模式切換時造成的振盪,下列何者有誤? (A)利用傳統 PI 控制器去同步化離合器兩端之轉速; (B)在模式轉換時,根據踏板強度,使用開路控制的方法進行扭矩補償; (C)使用電動機扭矩控制,消除轉換過程中離合器兩端因轉速差異所產生之滑動摩擦 力; (D)使用引擎扭矩控制,消除轉換過程之扭矩變化
14. 有關永磁電動機與感應電動機之比較,下列何者敘述不正確?(A)永磁電機相較於感應電動機對溫度較不敏感,不需擔心過熱問題;(B)永磁電動機之效率一般而言較感應電動機高;(C)永磁電動機與感應電動機之定子設計原理相同;(D)永磁電動機磁鐵是放置在轉子上,感應電動機不需要磁鐵
15. 有關電動車傳動齒輪箱系統之敘述,下列何者有誤?(A)目前市面上之電動汽車大多使用單速齒輪箱;(B)對單速齒輪箱而言,齒比越大車輛極速越低;(C)單速齒輪箱因無法兼顧加速性與車輛極速,故必須有所取捨;(D)為達到最佳之整體效率,越多速越好
16. 交流永磁同步電動機常用於電動車上,有關永磁同步電動機特性之敘述,下列何者有誤? (A)正交軸電抗大於直軸電抗( Lq Ld ),故電磁轉矩為永磁轉矩與磁阻轉矩之向量和; (B)正交軸電抗小於直軸電抗( Lq Ld ),故電磁轉矩為永磁轉矩與磁阻轉矩之向量和; (C)正交軸電抗等於直軸電抗( Lq = Ld ),故電磁轉矩為永磁轉矩與磁阻轉矩之向量和, 且為零; (D)永磁同步電動機啟動轉矩與定子旋轉磁場有關
17. 有一個三相感應電動電動機,4 極/60Hz,於滿載時的轉差率為 3﹪,其計算出滿載時的轉速為何? (A)1200 rpm; (B) 1746 rpm; (C) 3492 rpm; (D) 8000 rpm
18. 有一電荷帶電量是 18 庫侖,在電場中某點受力 90 牛頓,計算出該點的最小電場強度為何? (A) 5 N/C; (B) 0.2 C/N; (C) 1620 N‧C; (D) 5 kg
19. 有關變頻器使用應注意事項,下列何者有誤?(A)感應電動機使用於電動車時,須注意其最大轉矩輸出;(B)永磁同步電動機不能使用 FOC 變頻控制;(C)使用感應電動機做電動車動力時,須注意其最低轉速下的轉矩;(D)永磁同步電動機仍需使用 FOC 變頻控制
20. 有關永磁同步電動機驅動器之敘述,下列何者有誤?(A)需提供足夠大的暫態功率或瞬時電流;(B)要有足夠高的輸入輸出電氣隔離性能,方能使信號電路與功率驅動電路隔離;(C)具有靈敏的過電流保護能力;(D)輸出輸入間不需要良好的隔離保護
21. 有關電動車變頻器選用應注意事項,下列敘述何者正確?(A)應注意輸入端額定容量與輸出端轉矩速度曲線,但不須注意 PWM 的脈波數;(B)應注意輸入端額定容量與輸入端轉矩速度曲線,但要注意高速運轉轉矩;(C)應注意輸出端額定容量與輸出端轉矩速度曲線,但與滿載啟動轉矩無關;(D)應注意輸出端額定容量與輸出端轉矩速度曲線,尤其滿載啟動轉矩
22. 有關電動車剎車制動之敘述,下列何者有誤? (A)在負載慣性大的場合,當變頻器的頻率降低則同步速度降低,電動機速度高於同 步速度; (B)感應電動機的轉差率為負值時,則電動機變成感應發電機的作用而動作; (C)感應電動機的轉差率為正值時,則電動機變成感應發電機的作用而動作; (D)降低變頻器頻率以促使電動機作用變成發電機作用以產生制動者,稱之為「再生 (或回生)制動」
23. 當微處理機接受中斷(Interrupt)時,在其跳至中斷服務常式(Interrupt Service Routine)前應該做下列何者? (A)中斷計數器加一; (B)儲存被中斷程式的下一個程式地址和微處理機的狀態紀錄器(Status Register); (C)清除主記憶體的程式和資料; (D)顯示「中斷服務中」於螢幕上
24. 有關微處理器(Microprocessor)的組成,下列何者通常不是微處理器晶片內部的標準元件? (A)算術邏輯單元(ALU); (B)暫存器群(Register File); (C)石英晶體(Crystal Oscillator); (D)控制單元(Control Unit)
25. 變數 A 在 C 語言程式中之宣告為「char」,亦即「char A;」,若程式中「A = 200 +200;」,則此時 A 的值為何?(A) -112;(B) 144;(C) -56;(D) -100
26. 8051 微處理機在未設定優先級的情況下,若同時收到兩個中斷請求,CPU 會先執行哪一個中斷的服務程式? (A) 定時器中斷 1; (B) 外部中斷 1; (C) 定時器中斷 0; (D) 外部中斷 0
27. 8051 微處理機有 4 個中斷來源,外部中斷 0(INT0)、定時器 0 中斷(Timer0)、外部中斷 1(INT1)與定時器 1 中斷(Timer1),若系統已啟用中斷優先級功能,並且設定為 INT1 設為高優先級、其他中斷維持低優先級,若同時接收到 INT0 與 INT1兩個中斷請求,則 CPU 會先服務下列何者?(A)外部中斷 0(INT0);(B)定時器 0 中斷(Timer0);(C)外部中斷 1(INT1);(D)定時器 1 中斷(Timer1)
28. 有關 CAN FD(Controller Area Network with Flexible Data Rate)技術特性之敘述,下列何者正確? (A) CAN FD 的最大資料長度為 32 Bytes,適用於高頻小資料傳輸應用; (B) CAN FD 可在資料欄位傳輸階段提高位元傳輸速率,以提升整體傳輸效率; (C) CAN FD 的仲裁欄位與資料欄位皆可獨立設定不同的 ID 優先權; (D) CAN FD 傳輸速率固定為 1 Mbit/s,與 CAN 2.0B 相同,無法變動
29. 有關單晶片系統(Single-chip)與中央處理單元(CPU)之敘述,下列何者有誤?(A)單晶片系統是將 CPU I/O、memory 整合在單一晶片上;(B)單晶片不需一般作業系統即可運作;(C)單晶片系統的記憶體一般較 CPU 的記憶體大許多;(D) Intel i7 處理器是 CPU,不是單晶片系統
30. 有關類比數位轉換器(ADC)之敘述,下列何者有誤?(A) ADC 是一種輸出介面;(B) 10-bit ADC 可將輸入的類比信號轉為 10 位元數位資料;(C)如輸入信號範圍為 0-5 伏特,10bit ADC 可提供 5/1024 伏特的解析度;(D) ADC 可將外部的類比信號取樣轉為數位資料
31. 一般以按鈕之壓放為微處理機的輸出入訊號時,會產生所謂彈跳電子訊號,可使用下列何種基本元件組合降低該現象,以利按鈕正確訊號接收? (A)電容與電感; (B)電阻與電容; (C)電阻與電感; (D)電阻
32. 一具通用非同步收發傳輸器(UART)之微處理器,如使用傳輸鮑率為 9600 之串列埠時,則採用下列何種系統振盪器較合適? (A) 11.0592MHz; (B) 11.1024MHz; (C) 12MHz; (D) 24Hz
33. 有關電動車配電盤設計之敘述,下列何者有誤?(A)配電盤各迴路應包含保險絲及控制開關;(B)各子系統電力可同時開啟或關閉,無需考慮順序問題;(C)保險絲選用需評估各子系統電力負載狀態,並加上安全係數選用適當規格;(D)電力線材應以端子壓接後再鎖固,避免裸線直接安裝
34. 一個行動電源的電池容量為 20000mAh,若使用一個輸出規格為 5V / 2.4A 的充電器充電,假設充電效率為 90%,則將行動電源充滿約需多久? (A)約 7.4 小時; (B)約 8.3 小時; (C)約 9.2 小時; (D)約 10 小時
35. 一輛電動自行車使用直流-直流轉換器將主電池電壓由 60V 降至 12V,以供車內電子裝置使用。若 12V 側負載電流為 10A,且轉換器效率為 90%,其主電池端所需提供的電 流約為多少? (A) 18.3 A; (B) 11.0 A; (C) 7.5 A; (D) 2.2 A
36. 下圖為電動車輛之動力電動機與不同坡度行駛阻力之關係圖,請問此選配結果之車輛最大爬坡之坡度為何? (A) 0%; (B) 10%; (C) 20%; (D) 30%
37. 動力驅動電動機為電動車輛的關鍵零組件之一,為使電動車輛擁有良好的性能,我們期望驅動電動機具備較寬的調速範圍(high CPSR)、體積小、重量輕、效率高等特性,其中 CPSR 為恆定功率轉速比,若電動機均為相同功率等級的狀態下,下列何者為 CPSR 最大者? (A)額定轉速 3000 rpm / 峰值轉速 4500rpm; (B)額定轉速 3000 rpm / 峰值轉速 6000rpm; (C)額定轉速 5000 rpm / 峰值轉速 9000rpm; (D)額定轉速 5000 rpm / 峰值轉速 7500rpm
38. 有關電動車空調系統,下列敍述何者有誤?(A)電動冷媒壓縮機是用於調節車廂內部溫度,不能使用在調節高電壓電池溫度;(B)電動冷媒壓縮機是由高壓電系統供應其運作電源;(C)電動加熱器是由高壓電系統供應其運作電源;(D)電動加熱器是用於調節車廂內部溫度,並未使用在調節高電壓電池溫度
39. 有關電動車高壓配電系統設計的安全原則之敘述,下列何者有誤?(A)高壓配電迴路應配置保險絲或斷路器作為過流保護;(B)不同子系統可依實際功能需求設定上電/斷電順序;(C)為簡化設計,可使用裸線直接鎖固於接點以節省空間;(D)線材端接應使用壓接端子並進行固定,避免接觸不良或鬆脫
1. 下圖電動車(含二輪車)速度輸入信號是由踏板(或加速踏板)位置感測器經由實體線與 CAN Bus 輸入至動力驅動單晶片(MCU)微處理機,同時單晶片將變頻器之電壓電流速 度狀態傳送至 VCU 顯示,試判斷下圖是否有誤,若有請清楚圈選標示於該圖上。
2. 由於電動車(含二輪車)速度輸入信號是由踏板(或加速踏板)位置感測器經由實體線與 CAN Bus 輸入至動力驅動單晶片(MCU)微處理機,同時單晶片將變頻器之電壓電流速 度狀態傳送至 VCU 顯示,下圖架構何者可正確傳輸訊息,並指出錯誤圖。
3. 微處理器程式中檢查暫存器 P1(一位元組,Byte)之第 5 位元(bit,低位元自第 0 位元開 始),若該位元值為 1 則將該位元值更為 0,若該位元值為 0 則將該位元值更為 1,並 將新的 P1 值置(存)於變數 NewP1 中,而原 P1 值不變。下圖為其中處理該問題之程式, 試判斷下圖是否有誤,若有請清楚圈選標示於該圖上,並說明其理由。
4. 下表為某一電動車之 CAN Bus 資料通訊協定之部份定義,圖 3 為 CAN Bus 上之接收資料,試求此時馬達轉速、馬達扭力、馬達電壓、馬達功率、馬達 DC 電流、電池實際電壓、電池實際電流、電池殘量(SOC)之值。某一電動車之 CAN Bus 資料通訊協定(部份定義)表馬達轉速 = 0xDC60 x 0.5 = -1920x0.5 = -4560 rpm馬達扭力 = 0x1532 x 1 = 5426x1 = 5426 Nm馬達電壓 = 0x8D04 x 0.05 = 36100 x 0.05 = 1805 V馬達功率 = 0xBC88 x 0.125 = -17272 x 0.125 = -2159 kW馬達 DC 電流 = 0x29F4 x 0.05 = 10740 x 0.05 = 537 A實際電池電壓 = 0x4ECA x 0.1 = 20170 x 0.1 = 2017 V電池實際電流 = 0x406A x 0.1 = 16490 x 0.1 = 1649 A電池殘量(SOC) = 0xD9 x 0.4 = 217 x 0.4 = 86.8 %
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A)最大放電能力為 10C;(B)最大充電能力為 3C;(C)無論電池狀態如何均使用 3.65V 對電池充電;(D)低於截止電壓 2.1V 即電芯無法再使用
(A)最大放電能力為 10C;(B)最大充電能力為 3C;(C)無論電池狀態如何均使用 3.65V 對電池充電;(D)低於截止電壓 2.1V 即電芯無法再使用 (A)引擎運行的能量流向驅動輪;(B)引擎運轉並驅動電機/發電機給電池組充電;(C)來自電池組和發動機的能量被混合併流動到驅動輪;(D)來自驅動輪的能量用於電池組充電
(A)引擎運行的能量流向驅動輪;(B)引擎運轉並驅動電機/發電機給電池組充電;(C)來自電池組和發動機的能量被混合併流動到驅動輪;(D)來自驅動輪的能量用於電池組充電 (A)車速高於 100km/h 時,滾動阻力比空氣阻力大; (B)車速高於 90km/h 時,滾動阻力比空氣阻力大; (C)車速低於 100km/h 時,滾動阻力比空氣阻力大; (D)車速低於 80km/h 時,滾動阻力比空氣阻力大
(A)車速高於 100km/h 時,滾動阻力比空氣阻力大; (B)車速高於 90km/h 時,滾動阻力比空氣阻力大; (C)車速低於 100km/h 時,滾動阻力比空氣阻力大; (D)車速低於 80km/h 時,滾動阻力比空氣阻力大
 (A) 68;(B) 76;(C) 136;(D) 152
(A) 68;(B) 76;(C) 136;(D) 152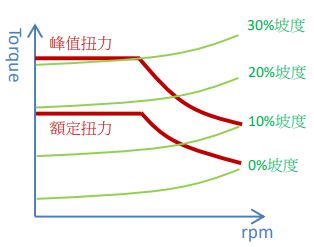 (A) 0%; (B) 10%; (C) 20%; (D) 30%
(A) 0%; (B) 10%; (C) 20%; (D) 30%




