題組內容
三、如下圖所示,有兩個質量滑塊滑行於無摩擦力平面上,兩質量滑塊間有 一彈簧牽住,第一個質量滑塊與牆壁間亦有一彈簧,各滑塊係於各彈簧 無預力時之初始位置,其中第一個質量滑塊被其下方之線性馬達驅動滑 行,其位置命令為 ,並以單位負回授方式比較與實際位移x1 間之差 異,再以比例控制增益 K 調整該線性馬達出力 F。
,並以單位負回授方式比較與實際位移x1 間之差 異,再以比例控制增益 K 調整該線性馬達出力 F。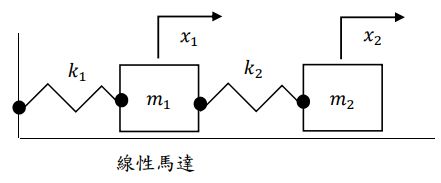
(二)試推導 為單位步階函數時之穩態誤差。(15分)
為單位步階函數時之穩態誤差。(15分)
 阿摩線上測驗
登入
阿摩線上測驗
登入
三、如下圖所示,有兩個質量滑塊滑行於無摩擦力平面上,兩質量滑塊間有 一彈簧牽住,第一個質量滑塊與牆壁間亦有一彈簧,各滑塊係於各彈簧 無預力時之初始位置,其中第一個質量滑塊被其下方之線性馬達驅動滑 行,其位置命令為,並以單位負回授方式比較與實際位移x1 間之差 異,再以比例控制增益 K 調整該線性馬達出力 F。
(二)試推導 為單位步階函數時之穩態誤差。(15分)