所屬科目:專科學力鑑定◆專(一):機電整合(實習)
1. 下列哪一項不是機電整合概念的技術領域?(A) 機械動力傳動機構 (B) 機電轉換(C) 控制器輸出入介面 (D) 利用人眼監視
2. 瞭解固態繼電器SSR(Solid State Relay)元件中,下列哪一項不包含在此元件中?(A) 光耦合器 (B) 負載電源(C) 整流放大迴路 (D) 三極交流開關TRIAC
3. 下列何者是位移感測器,用來量度直線位移的距離?(A) 線性可變差動變壓器LVDT (B) 旋轉編碼器(C) 反射型光電檢測器 (D) 滾珠導螺桿
4. 微電腦基本架構中,下列何者不包含在內?(A) 輸入/輸出單元 (B) 感測單元(C) 算術邏輯運算單元 (D) 控制單元
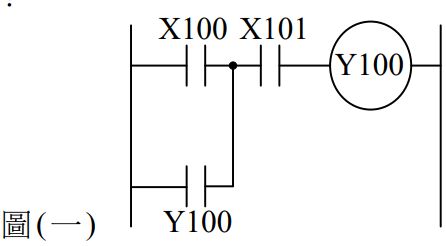
5. 有關可程式控制器PLC的動作原理,即機器的啟動/停止控制,如圖(一)所示。其對應的數位邏輯電路圖何者正確?(A)(B)(C)(D)
6. 下列何者不屬於可程式控制器PLC的輸出裝置?(A) 直流電動機 (B) 極限開關 (C) 蜂鳴器 (D) 電磁閥
7. 有關達靈頓放大電路中,針對其特性,下列敘述何者錯誤?(A) 輸入阻抗高 (B) 輸出阻抗低 (C) 頻率響應高 (D) 電流增益大
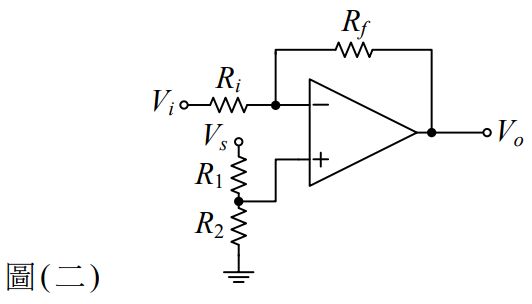
8. 某一理想運算放大器應用設計中,如圖(二)所示,其電路設計的結構,屬於下列哪一種電路? (A) 反相比較器 (B) 非反相放大器 (C) 反相放大器 (D) 非反相比較器
9. 使用增量型旋轉編碼器,其中有A相和B相,兩者輸出相差1 /4週期,其主要目的為何?(A) 校正原點 (B) 偵測馬達軸之扭力(C) 偵測馬達軸之轉速 (D) 偵測馬達軸之旋轉方向
10. 圖(三)為設計一套氣壓及其電氣迴路,下列敘述何者錯誤?(A)按PB1會使氣壓缸A往前行進 (B) 當氣壓缸A往前行時,鬆手不按PB1,氣壓缸A不會後退 (C) 當氣壓缸A到達且壓住a1時,若氣壓缸無法再前進,它會停留一段時間 (D) 當氣壓缸A回行至停止時,會自動再起動
11. 伺服機構的控制變數及其所屬控制迴路為何?(A) 濕度,閉迴路控制 (B) 溫度,開迴路控制(C) 位置,閉迴路控制 (D) 壓力,開迴路控制
12. 有一反相放大器電路,如圖(四)所示。其輸入電阻R1=750Ω,回授電阻Rf =7.5 kΩ,當輸入信號Vi為1.5V時,輸出電壓Vo為何? (A) – 25V(B) – 20V (C) – 15V (D) 20V
13. 下列哪種閘流體觸發開關元件,當導通之後陽陰極之間電壓降尚有10V左右?(A) DIAC (B) PUT (C) GTO (D) UJT
14. 若有一個重200 lb的人進入汽車中,此輛汽車下沉1.35 in,則此輛汽車懸掛系統的彈簧常數為何? (A) 49 lb /in (B) 74 lb /in (C) 99 lb /in (D) 148 lb /in
15. 有一顆每一步0.9 °的步進馬達,轉動一每英吋(in )有36螺紋的導螺桿,若要使導螺桿前進1.25 in需要多少步? (A) 6000 (B) 9000 (C) 12000 (D) 18000
16. 利用壓力感測器來量測槽內的某液體高度,已知該液體比重為45 lb/ft3,假設此時儀錶壓力是8.5 psi,則該液體的高度為何? (A) 8.7 ft (B) 10.3 ft (C) 15.6 ft (D) 27.2 ft
17. 有一絕對型光學旋轉編碼器(Optical Rotary Encoder),在某些特定的運用裡,必須有1.9 ° 的解析度,則需要有多少條軌道? (A) 5 (B) 8 (C) 10 (D) 12
18. 在達靈頓功率電晶體的放大驅動電路中,其供應電壓為12V,當馬達的轉速為500RPM 時,該馬達吸收了7V電壓、800mA電流,則此時該功率電晶體的功率散逸為何? (A) 8W (B) 6W (C) 5W (D) 4W
19. 有一顆直流馬達,當其轉動時,每100RPM的速度會產生反電動勢(Cemf)為0.6V,電樞阻抗 為12Ω,外部提供15V的電壓給此馬達運轉,則轉速為1800RPM時的電樞電流為何? (A) 1.25A (B) 0.95A (C) 0.65A (D) 0.35A
20. 已知有一PUT弛緩振盪電路,如圖(五)所示。其峰值(點火)電壓VP及振盪週期T為何?(A) 10.5V;2.46ms(B) 12.8V;3.72ms(C) 14.4V;3.24ms(D) 25.6V;7.40ms
21. 有一個液壓千斤頂,如圖(六)所示。其中小活塞直徑為0.6 in,且大活塞直徑為4 in,當從小活塞端輸入力Fin為15 lb時,則大活塞端輸出力Fout的大小為何? (A) 667 lb (B) 835 lb (C) 960 lb (D) 1075 lb
22. 使用共陰極七段顯示器時,通常選用何種IC來做解碼?(A) 7451 (B) 7447 (C) 7448 (D) 7449
23. 有一套比例控制系統,其Kp值為6 ft·lb/ °,欲控制一支機器手臂長為3 ft,假如它要舉起8 lb的重物,則穩態誤差為何?(A) 1 ° (B) 2 ° (C) 3 ° (D) 4 °
24. 以24VDC電壓提供一臺無負載直流馬達,其轉速為2400RPM。當負載加入後,則轉速降為2050RPM,則該馬達轉速調整率為何? (A) 12% (B) 15% (C) 17% (D) 21%
25. 兩地間的差值電壓是4V,其間有一條長350 ft,且其阻抗值為0.02Ω/ft的電線,則此兩地迴路電流值為何? (A) 0.35A (B) 0.57A (C) 1.33A (D) 1.67A
26. 機電整合系統若依照自動化工作的回授訊號來區分,何者為無回授系統?(A) 智慧型控制系統 (B) 閉迴路控制系統 (C) 數位化控制系統 (D) 開迴路控制系統
27. 可程式化邏輯控制器(PLC)採用階梯圖設計程序,如圖(七)所示為何種迴路? (A) 啟動優先迴路 (B) 交替迴路 (C) 互鎖迴路 (D) 自保持迴路
28. 微處理機所稱32位元或64位元,是依據系統何項規格能力?(A) 位址匯流排 (B) 資料匯流排 (C) 暫存器 (D) 控制匯流排
29. 微電腦啟動基本輸入/輸出系統(BIOS)程式,是位於何處?(A) 唯讀記憶體 (B) 快閃記憶體 (C) 隨機存取記憶體 (D) 記憶卡
30. 圖(八)為充電電路,則0.06Ω 的I3電流值為何? (A) 111A (B) 16.1A (C) 21.1A (D) 171A
31. 如圖(九)有三個點電荷位於一條X軸上,q1=6µ C,q2=1.5 µ C,q3=–2 µ C,兩兩相隔的距離為d1=3cm,d2=2cm,則q2所受的淨電力值為何? (假設庫侖常數值ke=8.99 × 109N‧m2 /C2 ) (A) 112N (B) 157N (C) 67N (D) 98N
32. 圖(十)為電路圖,則電感功率為何? (A) 800W (B) 300W (C) 100W (D) 500W
33. 圖(十一)為理想二極體電路,則二極體導通時之電流I為何?(A) 1.5mA(B) 2.5mA(C) 3mA(D) 2mA
34. 圖(十二)為電晶體工作電路,若 β=100時求增益Vo /Vs為何?(A) – 1.22(B) 3.29(C) – 2.97(D) 2.11
35. 圖(十三)設計一個數位電路為具增強型負載的NMOS反相器,若以QL為增強型 NMOS,其為QA的負載,在Vi=1運作情況為何?(A) 電路中QA導通,則Vo=1(B) 電路中QA截止,則Vo=0(C) 電路中QA截止,則Vo=1(D) 電路中QA導通,則Vo=0
36. 圖(十四)為一理想運算放大器,若有很高的開迴路增益100000,可用於驅動電路或感測器, 當V1=2µV、V2=4µV時,求輸出電壓Vo為何?(A) 0.1V (B) 0.2V (C) – 0.1V (D) – 0.2V
37. 使用美國電線規格AWG# 24的電線連接至溫度感測器與控制器,如圖(十五)所示,電線的總電阻規格為25.67Ω/ 1000 ft,兩者相距100 ft,來回總長為200 ft,溫度感測器輸出電壓範圍為0到10V,控制器的輸入電阻為1 kΩ,則電線上的最大壓降為何? (A) 0.05V(B) 0.5V (C) 0.02V (D) 0.2V
38. 圖(十六)為一個60Hz系統的控制電路,有一SCR矽控整流器(Silicon-Controlled Rectifier)的延遲和導通波形,SCR工作前要延遲5ms,則SCR的導通角度為何? (A) 51.2 ° (B) 92.1 ° (C) 33.3 ° (D) 71.9 °
39. 圖(十七)為系統處在平衡狀態,則彈簧刻度的讀值為何?(A) 36N(B) 81N(C) 16N(D) 49N
40. 圖(十八)為負載懸掛在以等速度移動的電梯天花板上,則拉住負載5kg之T1線的張力為何? (A) 27.6N (B) 11.5N (C) 31.5N (D) 41.4N
41. 有一個ADXL345的加速度計,溫度變化會影響輸出結果,精確度單位為0.01% / °C,當一物體0.01g以加速度移動10秒,結果呈現5cm的誤差,求其環境溫差為何?(g=10m/s2) (A) 500℃ (B) 100℃ (C) 10℃ (D) 50℃
42. 伺服控制可以使用何者感測器?①解角器、②絕對式軸編碼器、③增量式軸編碼器、④超音波感測器(A) ②、④ (B) ①、②、③ (C) ③、④ (D) ②、③、④
43. 一臺電動機之電樞電流為60A,且會產生120N-m之轉矩,若磁場強度降低為原來的80%,則電樞電流要增加多少,才能產生200N-m的新轉矩? (A) 125A (B) 200A (C) 75A (D) 50A
44. 一臺直流電動機所需電源電壓220V與電流5A,若有165W的總損失,則此電動機之效率為何? (A) 0.9 (B) 0.8 (C) 0.75 (D) 0.85
45. 一臺15 °/step的步進馬達,若先由順時針走88 step,接續逆時針走12step,若0 °為開始的參考位置,求最後位置為何? (A) 逆時針60o (B) 順時針30o (C) 順時針60o (D) 逆時針30o
46. 一臺電源電壓400V、60Hz和12極之三相Y接同步電動機,已知每相輸出功率1000W,求此電動機總轉矩為何? (A) 50 / πN-m (B) 250 / πN-m (C) 350 / πN-m (D) 150 / πN-m
47. 有一個氣壓缸的增壓迴路,已知大活塞的受壓面積為小活塞面積的4倍,則小活塞側壓力為大活塞側壓力的幾倍? (A) 2倍 (B) 6倍 (C) 4倍 (D) 16倍
48. 一臺氣壓式致動器為彈簧預載氣壓缸,其直徑為2 in、行程為1 in、彈簧係數為3 lb/in,利用壓力控制一個方向的移動,另一方向由彈簧控制,使用的氣體壓力為30 psi,則氣壓缸行程結束端供給全部負荷的力量為何? (A) 77.1 lb (B) 83.4 lb (C) 91.2 lb (D) 101.8 lb
49. 若要設計一臺步進馬達的位置控制系統,下列何者為其阻尼特性?(A) 過阻尼系統 (B) 臨界阻尼系統 (C) 次阻尼系統 (D) 無阻尼系統
50. 自動控制系統使用直流伺服馬達做為定位控制,透過調整比例積分微分控制 ( PID ) 的三個單元增益做為控制法則,若有無法到達設定值的穩態誤差時,需要調整哪一個參數來達成? (A) 比例值Kp (B) 輸入值調整 (C) 微分值Kd (D) 積分值Ki
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A)
(A) (B)
(B) (C)
(C) (D)
(D)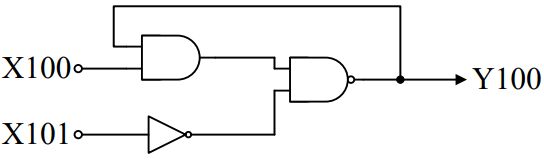
 (A) 反相比較器 (B) 非反相放大器 (C) 反相放大器 (D) 非反相比較器
(A) 反相比較器 (B) 非反相放大器 (C) 反相放大器 (D) 非反相比較器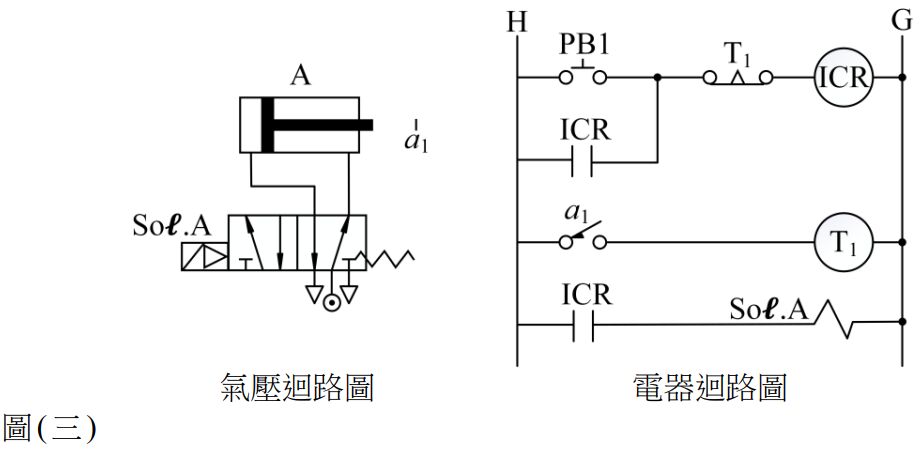 (A)按PB1會使氣壓缸A往前行進 (B) 當氣壓缸A往前行時,鬆手不按PB1,氣壓缸A不會後退 (C) 當氣壓缸A到達且壓住a1時,若氣壓缸無法再前進,它會停留一段時間 (D) 當氣壓缸A回行至停止時,會自動再起動
(A)按PB1會使氣壓缸A往前行進 (B) 當氣壓缸A往前行時,鬆手不按PB1,氣壓缸A不會後退 (C) 當氣壓缸A到達且壓住a1時,若氣壓缸無法再前進,它會停留一段時間 (D) 當氣壓缸A回行至停止時,會自動再起動 (A) – 25V(B) – 20V (C) – 15V (D) 20V
(A) – 25V(B) – 20V (C) – 15V (D) 20V (A) 10.5V;2.46ms(B) 12.8V;3.72ms(C) 14.4V;3.24ms(D) 25.6V;7.40ms
(A) 10.5V;2.46ms(B) 12.8V;3.72ms(C) 14.4V;3.24ms(D) 25.6V;7.40ms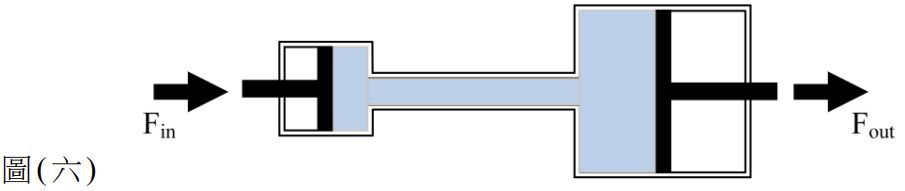 (A) 667 lb (B) 835 lb (C) 960 lb (D) 1075 lb
(A) 667 lb (B) 835 lb (C) 960 lb (D) 1075 lb (A) 啟動優先迴路 (B) 交替迴路 (C) 互鎖迴路 (D) 自保持迴路
(A) 啟動優先迴路 (B) 交替迴路 (C) 互鎖迴路 (D) 自保持迴路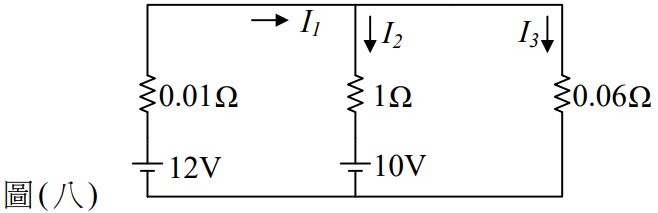 (A) 111A (B) 16.1A (C) 21.1A (D) 171A
(A) 111A (B) 16.1A (C) 21.1A (D) 171A (A) 112N (B) 157N (C) 67N (D) 98N
(A) 112N (B) 157N (C) 67N (D) 98N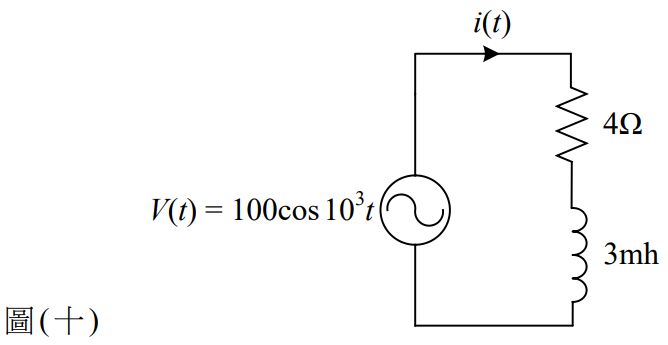 (A) 800W (B) 300W (C) 100W (D) 500W
(A) 800W (B) 300W (C) 100W (D) 500W (A) 1.5mA(B) 2.5mA(C) 3mA(D) 2mA
(A) 1.5mA(B) 2.5mA(C) 3mA(D) 2mA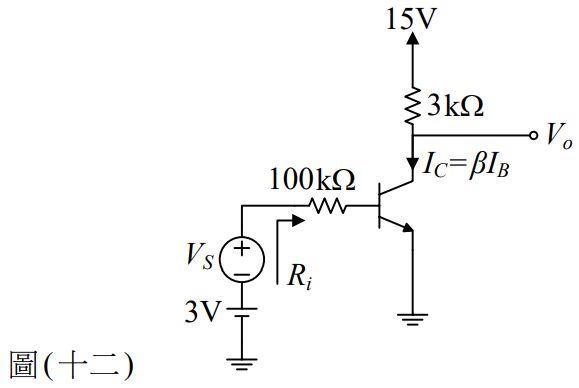 (A) – 1.22(B) 3.29(C) – 2.97(D) 2.11
(A) – 1.22(B) 3.29(C) – 2.97(D) 2.11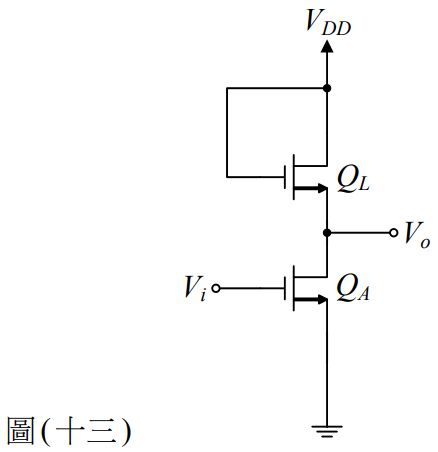 (A) 電路中QA導通,則Vo=1(B) 電路中QA截止,則Vo=0(C) 電路中QA截止,則Vo=1(D) 電路中QA導通,則Vo=0
(A) 電路中QA導通,則Vo=1(B) 電路中QA截止,則Vo=0(C) 電路中QA截止,則Vo=1(D) 電路中QA導通,則Vo=0 (A) 0.1V (B) 0.2V (C) – 0.1V (D) – 0.2V
(A) 0.1V (B) 0.2V (C) – 0.1V (D) – 0.2V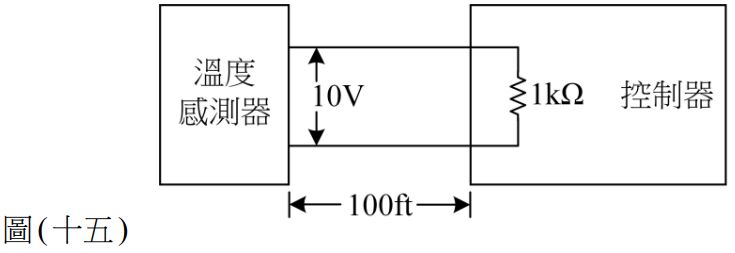 (A) 0.05V(B) 0.5V (C) 0.02V (D) 0.2V
(A) 0.05V(B) 0.5V (C) 0.02V (D) 0.2V (A) 51.2 ° (B) 92.1 ° (C) 33.3 ° (D) 71.9 °
(A) 51.2 ° (B) 92.1 ° (C) 33.3 ° (D) 71.9 ° (A) 36N(B) 81N(C) 16N(D) 49N
(A) 36N(B) 81N(C) 16N(D) 49N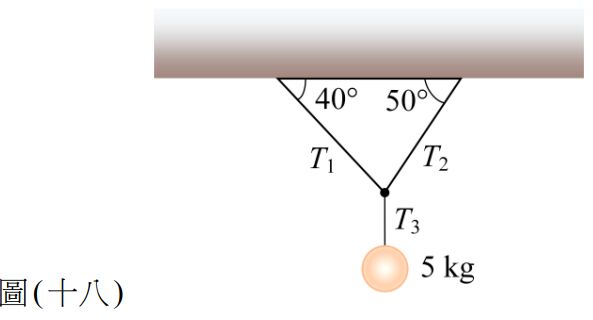 (A) 27.6N (B) 11.5N (C) 31.5N (D) 41.4N
(A) 27.6N (B) 11.5N (C) 31.5N (D) 41.4N