所屬科目:機器人學(初階)
1. 當馬達的扭力-轉速特性無法滿足機器人操作的條件時,可採用以下裝置改善之 (A)齒輪組 (B)速度感測器 (C)逆變器 (D)整流器。
2. 機器人定位控制中,有效消除穩態誤差的方式為 (A)採用積分(Integral control)控制 (B)提高微分控制(Derivative control) 的增益 (C)增加致動器的功率 (D)以上皆可。
3. 電機伺服控制中常用的 PID 控制器,PID 三項控制不包含下面哪一個控制項? (A)比例項 (B)加速度項 (C)積分項 (D)微分項。
4. 齒輪為一種重要的傳動系統元件,下列何種類型的齒輪組其兩軸之旋轉軸線有相交? (A)正齒輪組(spur gear) (B)傘齒輪組 (bevel gear) (C)螺旋齒輪組(helical gear) (D)蝸桿蝸輪組。
5. 常數增益 K=100,在波德圖大小特性圖上為多少 dB? (A)10 (B)20 (C)40 (D)60 dB。
6. 下列何者為軸承之主要功用? (A)承受軸上的扭轉力 (B)糾正軸之彎曲 (C)調整軸中心之位置 (D)保持軸中心之位置。
7. 有關步進馬達(Step motor)的敘述何者錯誤? (A)步進馬達轉速愈快時,轉矩愈小 (B)步進馬達沒有失步累進誤差的問題 (C)步進馬達由數位訊號來控制轉速及位置 (D)步進馬達的速度控制是由數位脈波頻率決定。
8. 防碰撞是移動機器人須具備的能力之一。下列何者感測器不能用於機器人的防碰撞? (A)光達 (B)光學攝影機 (C)電子羅盤 (D) 超音波。
9. 6 軸機械手臂的哪一軸可旋轉大於 360 度? (A)第 1 軸 (B)第 2 軸 (C)第 3 軸 (D)第 6 軸。
10. 下列何者「不是」量測環境資訊的感測器? (A)RGBD (B)RADAR (C)LIDAR (D)IMU。
11. 三指定心夾爪的設計,具有最大的優勢是什麼? (A)設計簡單 (B)夾爪的靈活度高 (C)價格便宜 (D)外型好看。
12. 在複式輪系中,若有偶數個中間輪,則首輪與末輪之轉向 (A)相反 (B)相同 (C)不一定 (D)無關。
13. 下列機器人智慧感測器元件中,何者無法感測距離? (A)紅外線感測器 (B)聲音感測器 (C)雷射儀器 (D)超聲波感測器。
14. 機器人夾爪非伺服型控制系統又稱 (A)開路系統 (B)閉路系統 (C)旋轉系統 (D)座標系統。
15. 多軸關節式機器人(機器手臂)的特點是高自由度與靈活性,常應用於物件的搬運,如取放與堆疊或複雜的加工、零組件的組裝或是工件去毛邊;並聯式機器人(Delta Robot)的特點是工作範圍僅限於手臂末端附近的圓柱狀區域與運作速度快,精度高且累積誤差小,工業上常搭配視覺系統來運作。試問下列何者適合以並聯式機器人來開發? (A)汽車板金噴漆 (B)食品自動化整列 (C)手 機外殼去毛邊及拋光 (D)汽車底盤焊接。
16. SCARA 機械手臂屬於何種座標? (A)極座標式 (B)直角座標式 (C)圓柱水平關節座標式 (D)關節手臂式。
17. 機器人常用的伺服馬達若控制方法是採用 PWM 控制,若要改變其轉速是要更改輸入脈波訊號的? (A)電流大小 (B)電壓值 (C)脈波寬度 (D)脈波頻率。
18. ISO/TS 15066 中定義之機器人協同合作(Collaborative Operation)為下列何者敘述? (A)在限定的工作區域中機器人與人直接互動 (B)由人所操縱之非自動化的機器人皆屬協同合作 (C)在限定的工作區域外機器人與人間接互動 (D)以上皆非。
19. 工業機器人使用交流伺服馬達驅動各軸做點對點運動,驅動器需設定為何種模式? (A)速度模式 (B)位置模式 (C)扭力模式 (D)寸動模式。
20. 只考慮單純夾放工件,夾爪的夾持力一般選用工作原件重量的幾倍,較為適當? (A)2 到 3 倍 (B)5 到 10 倍 (C)10 到 20 倍 (D)100 倍以上。
21. 有關 RS-485 的敘述,下列何者為正確? (A)資料傳輸速度較 RS-232 慢 (B)是一對一通訊的規格 (C)對抗雜訊較 RS-232 弱 (D)網路傳輸距離較 RS-232 強。
22. 考慮摩擦力的情況下,夾爪至少需要多少支手指才能穩定夾取三維物體? (A)2 (B)3 (C)4 (D)5 支。
23. 某家機械手臂生產公司採用 MODBUS/TCP,則採用筆電聯結工控電腦時,需要何種介面? (A)D 接頭 9 針 (B)D 接頭 37 針 (C)USB(D)RJ45。
24. 在旋轉式致動器中使用範圍最廣的為 (A)電力驅動之電動機 (B)液壓驅動之液壓旋轉馬達 (C)氣壓驅動之氣壓旋轉馬達 (D)數位訊號驅動之步進馬達。
25. 工業機器人之安全互鎖迴路之目的為 (A)當人員進入操作中範圍時,確認裝置開啟,作業即刻停止運作 (B)當人員進入操作中範圍時安全裝置關閉,作業繼續運作 (C)使作業分成多階段的停止功能 (D)必須同時觸動兩個或兩個以上的安全防護裝置才能停止 運作。
26. 當機器手臂之工作檯面被移動,但檯面內的工作點位並未被變動,需要做哪個校正動作? (A)零點校正 (B)工具座標校正 (C)基座座標校正 (D)以上皆是。
27. 滑模控制(sliding-mode control)屬於下面哪一種類型的控制器? (A)智慧型控制 (B)線性控制 (C)適應控制 (D)強健控制。
28. 編碼器 A 相與 B 相的訊號相位差為 (A)180 度 (B)45 度 (C)90 度 (D)以上皆非。
29. 以下哪項是正確的? (A)額定荷重就是最大荷重 (B)額定荷重值因機器人的伸展姿態不同而有變化 (C)額定荷重大小與荷重重心相對於腕中心點的距離有關 (D)額定荷重是指機器人在初始位置時的最大荷重。
30. 何者並非一個晶圓取放機械臂應用時考慮之重點? (A)機械臂之潤滑設計 (B)機械臂之重現精度 (C)機械臂之絕對精度 (D)機械臂夾爪之開口範圍。
31. 對於人員照護機器人之安全防護及補充保護措施,下列敘述何者有誤? (A)使用穩定性控制 (B)偵測不穩定性的即將發生 (C)提昇操作機速度或範圍 (D)防止過載。
32. 機器最擅長的是重覆性的工作, 下列有關於程式流程控制-重覆的描述,何者為誤? (A)While 先判斷條件是否成立,成立才繼續做 (B)通常在While程式區塊的最後面要有一個改變條件的命令 (C)Repeat Until迴圈先判斷條件是否成立,成立才繼續做 (D) 通常在 While 程式區塊的外面(前面)要有一個設定條件初值為真的命令。
33. 機械系統中的速度可以比擬成電路系統中的電流,力量可以比擬為電壓,請問機械系統中的阻尼相對於電路系統中的 (A)電感 (B)電容 (C)電晶體 (D)電阻。
34. 認知與推理(cognition and reasoning)賦予智慧機器人的更好的智能能力。下列不屬於認知與推理的正確陳述? (A)可認識環境,物件,景物 (B)可決定採用何種動作,用以達成在一已情境下的某一種特定目標 (C)只能用於成全域與區域路徑規劃,是一種能 力 (D)是決策能力,從何種路徑將被使規劃,到何種在環境資訊將被使用。
35. 關於任務程式規劃之執行方式,何者正確? (A)手動引導機器人端校器 (B)手動引導機械模擬裝置 (C)使用教導盒將機器人步進通過所欲到達之位置 (D)以上皆是。
36. 使用工業機器人視覺系統,追蹤夾取輸送帶上面的工件,輸送帶需要控制 (A)扭力 (B)速度 (C)加速度 (D)位移。
37. 下述有關夾爪的敘述,何者有誤? (A)在大部分的用途上,機械式平行夾爪比其它型式夾爪更為精確 (B)工作完成時,電磁式夾爪需要一個移除機構或工具將物件釋放 (C)氣壓驅動式夾爪具有成本低廉、重量輕及容易使用等優點 (D)當要夾取複雜形狀的物件時,三顎夾爪比兩顎夾爪更為適用。
38. 下列何者為 CNS 14487 中對於工具座標系統之定義? (A)附屬於機械介面之端效器為基準之座標系統 (B)附屬於機械介面以機器人基座為基準之座標系統 (C)附屬於人機介面以人操縱座標為基準得座標系統 (D)以上皆非。
39. 在國際工業機器人安全標準 ISO 10218-1 中,安全操作模式下,機器人的最大移動速度為 (A)300mm/s (B)250mm/s (C)200m/s(D)150mm/s。
40. 若一個伺服控制系統是一個標準二階系統,若其阻尼比(damping ratio)越大,最大超越量及共振峰值(resonant peak)之變化為下列何者? (A)最大超越量變小、共振峰值變小 (B)最大超越量變大、共振峰值變小 (C)最大超越量變小、共振峰值變大 (D)最 大超越量變大、共振峰值變大。
41. 工業機器人操作區域可分為(Ⅰ)最大操作範圍;(Ⅱ)限制區域範圍;(Ⅲ)正在作業操作範圍,一般工業機器人在運作時,勞工可以進入之區域為 (A)Ⅰ (B)Ⅱ (C)Ⅲ (D)以上皆非。
42. 智慧型機器人系統具有以下特徵? (A)模型的不確定性 (B)系統的高度非線性 (C)控制任務複雜性 (D)以上皆是。
43. 下列何者不屬於直流馬達的優點? (A)利用簡單的變阻器來調整加於馬達上的電壓就可以調整速度 (B)利用開關切換施加於馬達之電壓極性就可以使馬達反轉 (C)加速及減速可以被控制,以提供所期望的反應時間或減少晃動 (D)不會因施加於馬達的電流改變而改變輸出扭矩。
44. 若凸輪之速度線圖為一傾斜直線,則從動件之運動方式為 (A)靜止不動 (B)等速度運動 (C)等加(減)速度運動 (D)簡諧運動。
45. 在不考慮重力因素,欲計算各種姿態下,多自由度機器手臂各關節馬達力矩與末端點施力(Endpoint force)的靜態關係,除了使用牛頓的自由體圖分析外,也可使用 (A)克西霍夫定律 (B)安培法則 (C)虛功法 (D)疊加定理。
46. 地面上移動機器人在定位和導航時,常考慮幾個自由度? (A)2 (B)3 (C)4 (D)6 個。
47. 機器人的精度主要依存於機器誤差、控制演算法誤差與解析度系統誤差,一般來說 (A)絕對定位精度高於重複定位精度 (B)重複定位精度高於絕對定位精度 (C)機器精度高於控制精度 (D)控制精度高於解析度精度。
48. 下列何者不需要在機器人控制面盤明確標示? (A)總電源之開與關 (B)機器人廠牌與操作人員姓名資訊 (C)自動、手動、教導動作狀態之變換 (D)設備運行速度設定。
49. 圖中所示為機器人上常用的諧波減速機(Harmonic drive)的概念圖,具有三個元件。在一般減速的使用方式中,哪一個元件為和致動器相連的輸入端?(A)最內側元件 (B)中間元件 (C)外側元件 (D)都可以,視減速狀況而定。
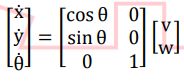
50. 考慮如圖的差速移動平台,假設 P 點為該移動平台的參考點,其座標為(x,y),方位角度角為 θ。假設該平台的直線速度為 v,旋轉角速度為 w,該差速移動平台的運動學方程式為 (A)(B)(C)(D)
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A)最內側元件 (B)中間元件 (C)外側元件 (D)都可以,視減速狀況而定。
(A)最內側元件 (B)中間元件 (C)外側元件 (D)都可以,視減速狀況而定。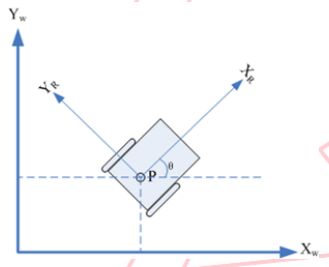 (A)
(A)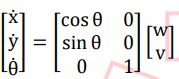 (B)
(B)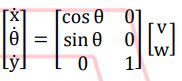 (C)
(C)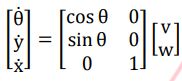 (D)
(D)